
Английский язык,
вопрос задал shmatvey2005,
4 года назад
Ответы на вопрос
Ответил MainBrain123
1
Ответ:
1)
D a
2)
B on
3)
B make
4)
A must
5)
B —
6)
A make
7)
C A lot of

D according to
9)
A intelligent
10)
A living
Можно, пожалуйста, лучший ответ
Предыдущий вопрос
Следующий вопрос
Новые вопросы
Математика,
7 месяцев назад
Дополни числа до 10. 6 — 2, 7 — 9. Записать примеры.
Литература,
7 месяцев назад
ЛИТЕРАТУРА СРОЧНО! 40 БАЛОВ (СТАНЦИОННЫЙ СМОТРИТЕЛЬ) ПЕРВОМУ ЛУЧШИЙ Распределите слова, обозначающие чувства и состояние героев произведения «Станционный смотритель»: 1. Отец. 2.Дочь. (Испуг,…
Информатика,
4 года назад
РЕШИТЕ В ПИТОНЕ!!!!!!!!!!!!!
Информатика,
4 года назад
РЕШИТЕ В ПИТОНЕ!!!!!!!!!!!!
Алгебра,
6 лет назад
Срочно!Розв’яжіть рівняння:
7x-39=2(x+3)+6-2x+5
3(x-5)=5(x-3)-4(2-3x)…
Математика,
6 лет назад
Помогите сделать 10 б…
R.U.R. is a 1920 science-fiction play by the Czech writer Karel Čapek. «R.U.R.» stands for Rossumovi Univerzální Roboti (Rossum’s Universal Robots,[1] a phrase that has been used as a subtitle in English versions).[2] The play had its world premiere on 2 January 1921 in Hradec Králové;[3] it introduced the word «robot» to the English language and to science fiction as a whole.[4] R.U.R. soon became influential after its publication.[5][6][7] By 1923, it had been translated into thirty languages.[5][8] R.U.R. was successful in its time in Europe and North America.[9] Čapek later took a different approach to the same theme in his 1936 novel War with the Newts, in which non-humans become a servant-class in human society.[10]
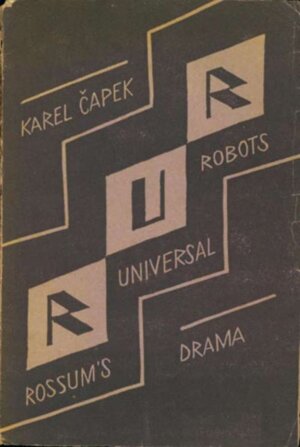
| R.U.R. | |
|---|---|

Cover of the first edition of the play designed by Josef Čapek, Aventinum, Prague, 1920 |
|
| Written by | Karel Čapek |
| Date premiered | 2 January 1921 |
| Original language | Czech |
| Genre | Science fiction |
CharactersEdit
The robots breaking into the factory at the end of Act III
Parentheses indicate names which vary according to translation. On the meaning of the names, see Ivan Klíma, Karel Čapek: Life and Work, 2002, p. 82.
- Humans
- Harry Domin (Domain): General Manager, R.U.R.
- Fabry: Chief Engineer, R.U.R.
- Dr. Gall: Head of the Physiological Department, R.U.R.
- Dr. Hellman (Hallemeier): Psychologist-in-Chief
- Jacob Berman (Busman): Managing Director, R.U.R.
- Alquist: Clerk of the Works, R.U.R.
- Helena Glory: President of the Humanity League, daughter of President Glory
- Emma (Nana): Helena’s maid
- Robots and robotesses
- Marius, a robot
- Sulla, a robotess
- Radius, a robot
- Primus, a robot
- Helena, a robotess
- Daemon (Damon), a robot
PlotEdit
SynopsisEdit
The play begins in a factory that makes artificial people, called roboti (robots), whom humans have created from synthetic organic matter. (As living creatures of artificial flesh and blood rather than machinery, the play’s concept of robots diverges from the idea of «robots» as inorganic. Later terminology would call them androids.) Robots may be mistaken for humans and can think for themselves. Initially happy to work for humans, the robots revolt and cause the extinction of the human race.
Act IEdit
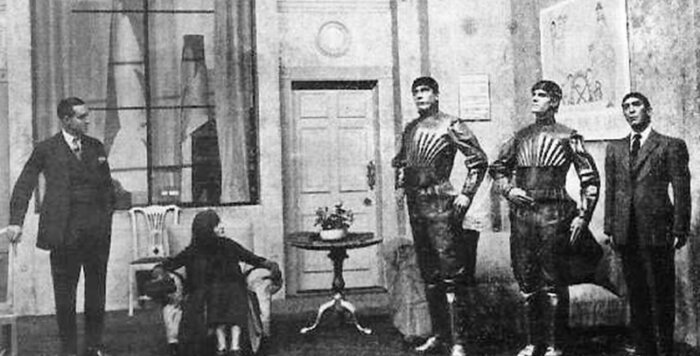
A scene from the play, showing three robots.
Helena, the daughter of the president of a major industrial power, arrives at the island factory of Rossum’s Universal Robots. Here, she meets Domin, the General Manager of R.U.R., who relates to her the history of the company. Rossum had come to the island in 1920 to study marine biology. In 1932, Rossum had invented a substance like organic matter, though with a different chemical composition. He argued with his nephew about their motivations for creating artificial life. While the elder wanted to create animals to prove or disprove the existence of God, his nephew only wanted to become rich. Young Rossum finally locked away his uncle in a lab to play with the monstrosities he had created and created thousands of robots. By the time the play takes place (circa the year 2000),[11] robots are cheap and available all over the world. They have become essential for industry.
After meeting the heads of R.U.R., Helena reveals that she is a representative of the League of Humanity, an organization that wishes to liberate the robots. The managers of the factory find this absurd. They see robots as appliances. Helena asks that the robots be paid, but according to R.U.R. management, the robots do not «like» anything.
Eventually Helena is convinced that the League of Humanity is a waste of money, but still argues robots have a «soul». Later, Domin confesses that he loves Helena and forces her into an engagement.
Act IIEdit
Ten years have passed. Helena and her nurse Nana discuss current events, the decline in human births in particular. Helena and Domin reminisce about the day they met and summarize the last ten years of world history, which has been shaped by the new worldwide robot-based economy. Helena meets Dr. Gall’s new experiment, Radius. Dr. Gall describes his experimental robotess, also named Helena. Both are more advanced, fully-featured robots. In secret, Helena burns the formula required to create robots. The revolt of the robots reaches Rossum’s island as the act ends.
Act IIIEdit
The characters sense that the very universality of the robots presents a danger. Echoing the story of the Tower of Babel, the characters discuss whether creating national robots who were unable to communicate beyond their languages would have been a good idea. As robot forces lay siege to the factory, Helena reveals she has burned the formula necessary to make new robots. The characters lament the end of humanity and defend their actions, despite the fact that their imminent deaths are a direct result of their choices. Busman is killed while attempting to negotiate a peace with the robots. The robots storm the factory and kill all the humans except for Alquist, the company’s chief engineer. The robots spare him because they recognize that «he works with his hands like the robots.»[12]
EpilogueEdit
Years have passed. Alquist, who still lives, attempts to recreate the formula that Helena destroyed. He is a mechanical engineer, though, with insufficient knowledge of biochemistry, so he has made little progress. The robot government has searched for surviving humans to help Alquist and found none alive. Officials from the robot government beg him to complete the formula, even if it means he will have to kill and dissect other robots for it. Alquist yields. He will kill and dissect robots, thus completing the circle of violence begun in Act Two. Alquist is disgusted. Robot Primus and Helena develop human feelings and fall in love. Playing a hunch, Alquist threatens to dissect Primus and then Helena; each begs him to take him- or herself and spare the other. Alquist now realizes that Primus and Helena are the new Adam and Eve, and gives the charge of the world to them.
Čapek’s conception of robotsEdit
The robots described in Čapek’s play are not robots in the popularly understood sense of an automaton. They are not mechanical devices, but rather artificial
biological organisms that may be mistaken for humans. A comic scene at the beginning of the play shows Helena arguing with her future husband, Harry Domin, because she cannot believe his secretary is a robotess:
DOMIN: Sulla, let Miss Glory have a look at you.
HELENA: (stands and offers her hand) Pleased to meet you. It must be very hard for you out here, cut off from the rest of the world.
SULLA: I do not know the rest of the world Miss Glory. Please sit down.
HELENA: (sits) Where are you from?
SULLA: From here, the factory.
HELENA: Oh, you were born here.
SULLA: Yes I was made here.
HELENA: (startled) What?
DOMIN: (laughing) Sulla isn’t a person, Miss Glory, she’s a robot.
HELENA: Oh, please forgive me…
His robots resemble more modern conceptions of man-made life forms, such as the Replicants in Blade Runner, the «hosts» in the Westworld TV series and the humanoid Cylons in the re-imagined Battlestar Galactica, but in Čapek’s time there was no conception of modern genetic engineering (DNA’s role in heredity was not confirmed until 1952). There are descriptions of kneading-troughs for robot skin, great vats for liver and brains, and a factory for producing bones. Nerve fibers, arteries, and intestines are spun on factory bobbins, while the robots themselves are assembled like automobiles.[13] Čapek’s robots are living biological beings, but they are still assembled, as opposed to grown or born.
One critic has described Čapek’s robots as epitomizing «the traumatic transformation of modern society by the First World War and the Fordist assembly line.»[13]
Origin of the word «robot»Edit
The play introduced the word robot, which displaced older words such as «automaton» or «android» in languages around the world. In an article in Lidové noviny, Karel Čapek named his brother Josef as the true inventor of the word.[14][15] In Czech, robota means forced labour of the kind that serfs had to perform on their masters’ lands and is derived from rab, meaning «slave».[16]
The name Rossum is an allusion to the Czech word rozum, meaning «reason», «wisdom», «intellect» or «common sense».[10] It has been suggested that the allusion might be preserved by translating «Rossum» as «Reason» but only the Majer/Porter version translates the word as «Reason».[17]
Production history and translationsEdit
The work was published in two differing versions in Prague by Aventinum in 1920 and 1921. After being postponed, it premiered at the city’s National Theatre on 25 January 1921, although an amateur group had by then already presented a production.[notes 1]
Already in 1921, ‘R.U.R.’ was translated from Czech into English by Paul Selver, and was adapted for the stage in English by Nigel Playfair in 1922.
The American première which derived from the adapted text was at the Garrick Theatre in New York City in October 1922, where it ran for 184 performances, a production in which Spencer Tracy and Pat O’Brien played robots[which?] in their Broadway debuts.[18] Helena was portrayed by Kentuckian actress and antiwar activist Mary Crane Hone in her Broadway debut.[19]
In April 1923 Basil Dean produced R.U.R. in Britain for the Reandean Company at St Martin’s Theatre, London.[20]
In the 1920s, the play was performed in a number of American and British cities, e.g. the Theatre Guild «Road» in Chicago and Los Angeles during 1923.[21]
In 1923, two different adapted versions of the translation were published, relating to the American and British premiéres respectively. The US version was published in Garden City by Doubleday, Page & Company, the British one in London by Humphrey Milford, Oxford University Press.
Both published versions abridged the play and eliminated a Robot character named «Damon», the other changes, however, differed. [22]
In 1989, a new, unabridged translation by Claudia Novack-Jones restored the elements of the play eliminated by Selver.[22][23] Another unabridged translation was produced by Peter Majer and Cathy Porter for Methuen Drama in 1999.[17]
Critical receptionEdit
Reviewing the New York production of R.U.R., The Forum magazine described the play as «thought-provoking» and «a highly original thriller».[24] John Clute has lauded R.U.R. as «a play of exorbitant wit and almost demonic energy» and lists the play as one of the «classic titles» of inter-war science fiction.[25] Luciano Floridi has described the play thus: «Philosophically rich and controversial, R.U.R. was unanimously acknowledged as a masterpiece from its first appearance, and has become a classic of technologically dystopian literature.»[26] Jarka M. Burien called R.U.R. a «theatrically effective, prototypal sci-fi melodrama».[9]
On the other hand, Isaac Asimov, author of the Robot series of books and creator of the Three Laws of Robotics, stated: «Capek’s play is, in my own opinion, a terribly bad one, but it is immortal for that one word. It contributed the word ‘robot’ not only to English, but through English, to all the languages in which science fiction is now written.»[4] In fact, Asimov’s «Laws of Robotics» are specifically and explicitly designed to prevent the kind of situation depicted in R.U.R. – since Asimov’s Robots are created with a built-in total inhibition against harming human beings or disobeying them.
AdaptationsEdit
- On 11 February 1938, a 35-minute adaptation of a section of the play was broadcast on BBC Television—the first piece of television science-fiction ever to be broadcast. Some low quality stills have survived, although no recordings of the production are known to exist.[27] and in 1948, another television adaptation—this time of the entire play, running to 90 minutes—was screened by the BBC with Radius played by Patrick Troughton, who was later the second actor to play The Doctor in Doctor Who.[28]
- BBC Radio has broadcast a number of productions, including a 1927 2LO London version,[29] a 1933 BBC Regional Programme version,[30] a 1941 BBC Home Service version,[31] and a 1946 BBC Home Service version,[32]. BBC Radio 3 dramatised the play again in 1989,[33] and this version has been released commercially. A light-hearted 2-part musical adaptation was broadcast on April 3 and 10, 2022, on BBC Radio 4, with story by Robert Hudson and music by Susannah Pearse; the second episode continues the story after all humans have been killed and the robots now have emotions.[34]
- The Hollywood Theater of the Ear dramatized an unabridged audio version of R.U.R. which is available on the collection 2000x: Tales of the Next Millennia.[35][36]
- In August 2010, Portuguese multi-media artist Leonel Moura’s R.U.R.: The Birth of the Robot, inspired by the Čapek play, was performed at Itaú Cultural in São Paulo, Brazil. It utilized actual robots on stage interacting with the human actors.[37]
- An electro-rock musical, Save The Robots is based on R.U.R., featuring the music of the New York City pop-punk art-rock band Hagatha.[38] This version with book and adaptation by E. Ether, music by Rob Susman, and lyrics by Clark Render wa an official selection of the 2014 New York Musical Theatre Festival season.[39]
- On 26 November 2015 The RUR-Play: Prologue, the world’s first version of R.U.R. with robots appearing in all the roles, was presented during the robot performance festival of Cafe Neu Romance at the gallery of the National Library of Technology in Prague.[40][41][42] The concept and initiative for the play came from Christian Gjørret, leader of «Vive Les Robots!» [43] who, on 29 January 2012, during a meeting with Steven Canvin of LEGO Group, presented the proposal to Lego, that supported the piece with the LEGO MINDSTORMS robotic kit. The robots were built and programmed by students from the R.U.R team from Gymnázium Jeseník. The play was directed by Filip Worm and the team was led by Roman Chasák, both teachers from the Gymnázium Jeseník.[44][45]
In popular cultureEdit
- Eric, a robot constructed in Britain in 1928 for public appearances, bore the letters «R.U.R.» across its chest.[46]
- The 1935 Soviet film Loss of Sensation, though based on the 1929 novel Iron Riot, has a similar concept to R.U.R., and all the robots in the film prominently display the name «R.U.R.»[47]
- In the American science fiction television series Dollhouse, the antagonist corporation, Rossum Corp., is named after the play.[48]
- In the Star Trek episode «Requiem for Methuselah», the android’s name is Rayna Kapec (an anagram, though not a homophone, of Capek, Čapek without its háček).[49]
- In the two-part Batman: The Animated Series episode «Heart of Steel», the scientist that created the HARDAC machine is named Karl Rossum. HARDAC created mechanical replicants to replace existing humans, with the ultimate goal of replacing all humans. One of the robots is seen driving a car with «RUR» as the license plate number.[50]
- In the 1977 Doctor Who serial «The Robots of Death», the robot servants turn on their human masters under the influence of an individual named Taren Capel.[51]
- In the 1978 Norwegian TV series Blindpassasjer, Rossum is the name of a planet ruled by robots.
- In the 1995 science fiction series The Outer Limits, in the remake of the «I, Robot» episode from the original 1964 series, the business where the robot Adam Link is built is named «Rossum Hall Robotics».[citation needed]
- The 1999 Blake’s 7 radio play The Syndeton Experiment included a character named Dr. Rossum who turned humans into robots.[52]
- In the «Fear of a Bot Planet» episode of the animated science fiction TV series Futurama, the Planet Express crew is ordered to make a delivery on a planet called «Chapek 9», which is inhabited solely by robots.[53]
- In Howard Chaykin’s Time² graphic novels, Rossum’s Universal Robots is a powerful corporation and maker of robots.[54]
- In Spacehunter: Adventures in the Forbidden Zone, when Wolff wakes Chalmers, she has been reading a copy of R.U.R. in her bed. This presages the fact that she is later revealed to be a gynoid.[citation needed]
- In the 2016 video game Deus Ex: Mankind Divided, R.U.R. is performed in an underground theater in a dystopian Prague by an «augmented» (cyborg) woman who believes herself to be the robot Helena.[55]
- In the 2018 British alternative history drama Agatha and the Truth of Murder, Agatha is seen reading R.U.R. to her daughter Rosalind as a bedtime story.
- In the 2021 movie Mother/Android, the play R.U.R. of Karel Čapek comes up. In the movie, Arthur, an AI programmer, turns to be an android.
See alsoEdit
- AI takeover
- The Steam Man of the Prairies (1868), an early American depiction of a «mechanical man»
- Tik-Tok, L. Frank Baum’s earlier depiction (1907) of a similar entity
- Detroit: Become Human (2018), a narrative video game built around a rebellion by androids who become sentient.
ReferencesEdit
Informational notes
- ^ The world premiere was planned to be in the National Theater in Prague, but had to be postponed to 25 January 1921. The amateur theater group Klicpera in Hradec Králové, which was supposed to mount a production after the premiere, was not informed about the date change in the National Theater, so their opening night on 2 January 1921 was the actual world premiere. See: Databáze amatérského divadla, soubor Klicpera
Citations
- ^ Roberts, Adam (2006). The History of Science Fiction. New York: Palgrave Macmillan. p. 168. ISBN 978-0-333-97022-5.
- ^ Kussi, Peter. Toward the Radical Center: A Čapek Reader. (33).
- ^ Kubařová, Petra (3 February 2021) «Světová premiéra R.U.R. byla před 100 lety v Hradci Králové» («The world premiere of RUR was 100 years ago in Hradec Králové») University of Hradci Králové
- ^ a b Asimov, Isaac (September 1979). «The Vocabulary of Science Fiction». Asimov’s Science Fiction.
- ^ a b Voyen Koreis. «Capek’s RUR». Archived from the original on 23 December 2013. Retrieved 23 July 2013.
- ^ Madigan, Tim (July–August 2012). «RUR or RU Ain’t A Person?». Philosophy Now. Archived from the original on 3 February 2013. Retrieved 24 July 2013.
- ^ Rubin, Charles T. (2011). «Machine Morality and Human Responsibility». The New Atlantis. Archived from the original on 26 October 2013. Retrieved 24 July 2013.
- ^ «Ottoman Turkish Translation of R.U.R. – Library Details» (in Turkish). Archived from the original on 3 February 2014. Retrieved 24 July 2013.
- ^ a b Burien, Jarka M. (2007) «Čapek, Karel» in Gabrielle H. Cody, Evert Sprinchorn (eds.) The Columbia Encyclopedia of Modern Drama, Volume One. New York: Columbia University Press. pp. 224–225. ISBN 0231144229
- ^ a b
Roberts, Adam «Introduction», to RUR & War with the Newts. London, Gollancz, 2011, ISBN 0575099453 (pp. vi–ix). - ^ According to the poster for the play’s opening in 1921; see Klima, Ivan (2004) «Introduction» to R.U.R., Penguin Classics
- ^ Čapek, Karel (2001). R.U.R.. translated by Paul Selver and Nigel Playfair. Dover Publications. p. 49.
- ^ a b Rieder, John «Karl Čapek» in Mark Bould (ed.) (2010) Fifty Key Figures in Science Fiction. London, Routledge. ISBN 9780415439503. pp. 47–51.
- ^ «Who did actually invent the word ‘robot’ and what does it mean?». Archived from the original on 27 July 2013. Retrieved 25 July 2013.
- ^ Margolius, Ivan (Autumn 2017) «The Robot of Prague» Archived 11 September 2017 at the Wayback Machine The Friends of Czech Heritage Newsletter no. 17, pp.3-6
- ^ «robot». Free Online Dictionary. Archived from the original on 6 July 2013. Retrieved 25 July 2013.
- ^ a b Klíma, Ivan, Karel Čapek: Life and Work. Catbird Press, 2002 ISBN 0945774532 (p. 260).
- ^ Corbin, John (10 October 1922). «A Czecho-Slovak Frankenstein». New York Times. p. 16/1.; R.U.R (1922 production) at the Internet Broadway Database
«Spencer Tracy Biography». Biography.com. Archived from the original on 8 September 2011. Retrieved 26 July 2013.
Swindell, Larry. Spencer Tracy: A Biography. New American Library. pp. 40–42. - ^ Morris County Historical Society at Acorn Hall. «Museum’s social media post containing newspaper clippings about Hone». www.facebook.com. Archived from the original on 11 August 2022. Retrieved 10 August 2022.
- ^ Cornis-Pope, Marcel; Neubauer, John (20 May 2004). History of the Literary Cultures of East-Central Europe: Junctures and Disjunctures in the 19th and 20th Centuries. John Benjamins Publishing. ISBN 9027234558. Archived from the original on 13 March 2017. Retrieved 20 May 2020 – via Google Books.
- ^ Butler, Sheppard (16 April 1923). «R.U.R.: A Satiric Nightmare». Chicago Daily Tribune. p. 21.; «Rehearsals in Progress for ‘R.U.R.’ Opening». Los Angeles Times. 24 November 1923. p. I13.
- ^ a b Abrash, Merritt (1991). «R.U.R. Restored and Reconsidered». Extrapolation. 32 (2): 185–192. doi:10.3828/extr.1991.32.2.184.
- ^ Kussi, Peter, ed. (1990). Toward the Radical Center: A Karel Čapek Reader. Highland Park, New Jersey: Catbird Press. pp. 34–109. ISBN 0-945774-06-0.
- ^ Holt, Roland (November 1922) «Plays Tender and Tough». pp. 970–976. The Forum
- ^ Clute, John (1995). Science Fiction: The Illustrated Encyclopedia. Dorling Kindersley. pp. 119, 214. ISBN 0-7513-0202-3.
- ^ Floridi, Luciano (2002) Philosophy and Computing: An Introduction. Taylor & Francis. p.207. ISBN 0203015312
- ^ Telotte, J. P. (2008). The essential science fiction television reader. University Press of Kentucky. p. 210. ISBN 978-0-8131-2492-6. Archived from the original on 13 March 2017.
- ^ «R.U.R. (Rossum’s Universal Robots)». Radio Times. No. 1272. 27 February 1948. p. 27. ISSN 0033-8060. Retrieved 9 February 2018.
- ^ «R.U.R.» BBC Programme Index. Retrieved 7 June 2022.
- ^ «‘R.U.R’«. BBC Programme Index. Retrieved 7 June 2022.
- ^ «R.U.R.» BBC Programme Index. Retrieved 7 June 2022.
- ^ «Saturday Night Theatre: Winifred Shotter and Laidmnan Browne in ‘R.U.R.’«. BBC Programme Index. Retrieved 7 June 2022.
- ^ «The Friday Play: RUR (Rossum’s Universal Robots)». BBC Programme Index. Retrieved 6 June 2022.
- ^ «Rossom’s Universal Robots». BBC. 8 April 2022. Retrieved 10 April 2022.
- ^ «2000x: Tales of the Next Millennia». Archived from the original on 10 May 2013. Retrieved 29 July 2013.
- ^ 2000X: Tales of the Next Millennia. ISBN 1-57453-530-7.
- ^ «Itaú Cultural: Emoção Art.ficial «2010 Schedule»«. Archived from the original on 30 June 2017. Retrieved 6 August 2013.
- ^ «Save The Robots the Musical Summary». Archived from the original on 14 July 2014.
- ^ «Save The Robots: NYMF Developmental Reading Series 2014». Archived from the original on 17 June 2014. Retrieved 13 June 2014.
- ^ «Cafe Neu Romance – CNR 2015: Live: Vive Les Robots (DNK): The RUR-Play: Prologue». cafe-neu-romance.com. Archived from the original on 3 April 2016. Retrieved 20 May 2020.
- ^ «VIDEO: Poprvé bez lidí. Roboti zcela ovládli Čapkovu hru R.U.R.» iDNES.cz. 27 November 2015. Archived from the original on 26 March 2016. Retrieved 19 March 2016.
- ^ «Entertainment Czech Republic Robots | AP Archive». www.aparchive.com. Archived from the original on 29 March 2016. Retrieved 19 March 2016.
- ^ «Christian Gjørret on robot & performance festival Café Neu Romance». 4 December 2015.
- ^ «VIDEO: Poprvé bez lidí. Roboti zcela ovládli Čapkovu hru R.U.R.» iDNES.cz. 27 November 2015.
- ^ «Gymnázium Jeseník si zapsalo jedinečné světové prvenství v historii robotiky i umění». jestyd.cz.
- ^ Wright, Will; Kaplan, Steven (1994). The Image of Technology in Literature, the Media, and Society: Selected Papers from the 1994 Conference [of The] Society for the Interdisciplinary Study of Social Imagery. The Society. p. 3. Archived from the original on 7 March 2017.
- ^ Christopher, David (31 May 2016). «Stalin’s «Loss of Sensation»: Subversive Impulses in Soviet Science-Fiction of the Great Terror». MOSF Journal of Science Fiction. 1 (2). ISSN 2474-0837. Archived from the original on 26 December 2016.
- ^ Dollhouse:»Getting Closer» between 41:52 and 42:45
- ^ Okuda, Michael; Okuda, Denise; Mirek, Debbie (17 May 2011). The Star Trek Encyclopedia. Simon and Schuster. pp. 883–. ISBN 978-1-4516-4688-7. Archived from the original on 10 June 2016. Retrieved 10 February 2018.
- ^ Stein, Michael (20 February 2012). «Batman and Robin swoop into Prague». Česká pozice. Reuters. Retrieved 9 February 2018.
- ^ Cornell, Paul; Day, Martin; Topping, Keith (1995). «90 ‘The Robots of Death’«. Doctor Who: The Discontinuity Guide. London: Doctor Who Books. p. 205. ISBN 0-426-20442-5. Archived from the original on 30 March 2017.
- ^ «THE SYNDETON EXPERIMENT». www.hermit.org. Archived from the original on 5 July 2010. Retrieved 20 May 2020.
- ^ Booker, M. Keith. Drawn to Television: Prime-Time Animation from The Flintstones to Family Guy. pp. 115–124.
- ^ Costello, Brannon (11 October 2017). Neon Visions: The Comics of Howard Chaykin. LSU Press. p. 113. ISBN 978-0-8071-6806-6. Retrieved 10 February 2018.
- ^ Deus Ex: Mankind Divided – Strategy Guide. Gamer Guides. 30 September 2016. p. 44. ISBN 978-1-63041-378-1. Retrieved 10 February 2018.
External linksEdit
Wikimedia Commons has media related to R.U.R..
Wikisource has original text related to this article:
- R.U.R. at Standard Ebooks
- R.U.R. (Rossum’s Universal Robots) at Project Gutenberg
- R.U.R. in Czech from Project Gutenberg
- Audio extracts from the SCI-FI-LONDON adaptation Archived 4 March 2012 at the Wayback Machine
- Karel Čapek bio.
- Online facsimile version of the 1920 first edition in Czech.
- R.U.R. at the Internet Broadway Database
- (in English) R.U.R. public domain audiobook at LibriVox
Karel Čapek’s play «R.U.R.» premiered in January 1921. Its influence cannot be overstated.
By the time his play “R.U.R.” (which stands for “Rossum’s Universal Robots”) premiered in Prague in 1921, Karel Čapek was a well-known Czech intellectual. Like many of his peers, he was appalled by the carnage wrought by the mechanical and chemical weapons that marked World War I as a departure from previous combat. He was also deeply skeptical of the utopian notions of science and technology. “The product of the human brain has escaped the control of human hands,” Čapek told the London Saturday Review following the play’s premiere. “This is the comedy of science.”
In that same interview, Čapek reflected on the origin of one of the play’s characters:
The old inventor, Mr. Rossum (whose name translated into English signifies “Mr. Intellectual” or “Mr. Brain”), is a typical representative of the scientific materialism of the last [nineteenth] century. His desire to create an artificial man — in the chemical and biological, not mechanical sense — is inspired by a foolish and obstinate wish to prove God to be unnecessary and absurd. Young Rossum is the modern scientist, untroubled by metaphysical ideas; scientific experiment is to him the road to industrial production. He is not concerned to prove, but to manufacture.
Thus, “R.U.R.,” which gave birth to the robot, was a critique of mechanization and the ways it can dehumanize people. The word itself derives from the Czech word “robota,” or forced labor, as done by serfs. Its Slavic linguistic root, “rab,” means “slave.” The original word for robots more accurately defines androids, then, in that they were neither metallic nor mechanical.
The contrast between robots as mechanical slaves and potentially rebellious destroyers of their human makers echoes Mary Shelley’s “Frankenstein” and helps set the tone for later Western characterizations of robots as slaves straining against their lot, ready to burst out of control. The duality echoes throughout the twentieth century: Terminator, HAL 9000, Blade Runner’s replicants.
The character Helena in “R.U.R.” is sympathetic, wanting the robots to have freedom. Radius is the robot that understands his station and chafes at the idiocy of his makers, having acted out his frustrations by smashing statues.
Helena: Poor Radius. … Couldn’t you control yourself? Now they’ll send you to the stamping mill. Won’t you speak? Why did it happen to you? You see, Radius, you are better than the rest. Dr. Gall took such trouble to make you different. Won’t you speak?
Radius: Send me to the stamping mill.
Helena: I am sorry they are going to kill you. Why weren’t you more careful?
Radius: I won’t work for you. Put me into the stamping mill.
Helena: Why do you hate us?
Radius: You are not like the Robots. You are not as skillful as the Robots. The Robots can do everything. You only give orders. You talk more than is necessary.
Helena: That’s foolish Radius. Tell me, has any one upset you? I should so much like you to understand me.
Radius: You do nothing but talk.
Helena: Dr. Gall gave you a larger brain than the rest, larger than ours, the largest in the world. You are not like the other Robots, Radius. You understand me perfectly.
Radius: I don’t want any master. I know everything for myself.
Helena: That’s why I had you put into the library, so that you could read everything, understand everything, and then — Oh, Radius, I wanted to show the whole world that the Robots were our equals. That’s what I wanted of you.
Radius: I don’t want any master. I want to be master over others.
Helena’s compassion saves Radius from the stamping mill, and he later leads the robot revolution that displaces the humans from power. Čapek is none too subtle in portraying the triumph of artificial humans over their creators:
Radius: The power of man has fallen. By gaining possession of the factory we have become masters of everything. The period of mankind has passed away. A new world has arisen. … Mankind is no more. Mankind gave us too little life. We wanted more life.
Humans were doomed in the play even before Radius led the revolt. When mechanization overtakes basic human traits, people lose the ability to reproduce. As robots increase in capability, vitality, and self-awareness, humans become more like their machines — humans and robots, in Čapek’s critique, are essentially one and the same. The measure of worth, industrial productivity, is won by the robots that can do the work of “two and a half men.” Such a contest implicitly critiques the efficiency movement that emerged just before World War I, which ignored many essential human traits.
The debt of “R.U.R.” to Shelley’s “Frankenstein” is substantial, even though the works are separated by almost exactly a century. In both cases, humans show hubris by trying to create artificial life. (Recall that even today, Rodney Brooks, an esteemed roboticist and former director of the MIT Artificial Intelligence Lab, refers to robots as “our creatures.”) Whether humans get the recipe wrong, as in the earlier novel, or make beings smarter than the humans who spawned them, as in the case of Čapek’s play and its offspring, humans pay the price for aspiring to play God. In both works, the flawed relationship between creator and creature drives the plot, and in both cases, the conflict ends in bloodshed.
Few people today know “R.U.R.” But in its time, the play was a sensation, with translations into more than 30 languages immediately after publication. Nearly 100 years on, apart from our obvious reliance on the play’s terminology and worldview, we still hear its echoes. The author and play title turn up as Easter eggs in such popular venues as Batman cartoons, Star Trek, Dr. Who, and Futurama: The people who portray our culture’s robots certainly know of their debt to Čapek, even if most of us do not.
John Jordan is a technology analyst and Clinical Professor of Supply Chain and Information Systems in Smeal College of Business at Penn State University. He is the author of “Robots” and “3D Printing,” both in the MIT Press Essential Knowledge series.
Read the following passage and mark the letter A, B, C, or D on your answer sheet to indicate the correct answer to each of the questions.
The word robot first appeared in a 1921 stage play by Czech writer Karel Capek. In the play, a man makes a machine that can think, which he calls a robot and which ends up killing its owner. In the 1940s, the American science fiction writer Isaac Asimov wrote a series of stories about robots and invented the term robotics, the science of robots. Meanwhile, in the real world, the first robots were developed by an engineer, Joseph F. Engelberger, and an inventor, George C. Devol. Together they started Unimation, a manufacturing company that produced the first real robot in 1961, called the Unimate. Robots of this type were installed at a General Motors automobile plant and proved to be a success. They worked reliably and saved money for General Motors, so other companies were soon acquiring robots as well.
These industrial robots were nothing like the terrifying creatures that can often be seen in science fiction films. In fact, these robots looked and behaved nothing like humans. They were simply pieces of computer-controlled machinery, with metal «arms» or «hands.» Since they were made of metal, they could perform certain jobs that were difficult or dangerous for humans, particularly jobs that involve high heat. And since robots were tireless and never got hungry, sleepy, or distracted, they were useful for tasks that would be tiring or boring for humans. Industrial robots have been improved over the years, and today they are used in many factories around the world. Though the use of robots has meant the loss of some jobs, at the same time other jobs have been created in the design, development, and production of the robots.
• Outside of industry, robots have also been developed and put to use by governments and scientists in situations where humans might be in danger. For example, they can be sent in to investigate an unexploded bomb or an accident at a nuclear power plant. B• In space exploration, robots have performed many key tasks where humans could not be present, such as on the surface of Mars. C• In 2004, two robotic Rovers-small six-wheeled computerized cars-were sent to Mars. D•
Read the following passage and mark the letter A, B, C, or D on your answer sheet to indicate the correct answer to each of the questions.
The word robot first appeared in a 1921 stage play by Czech writer Karel Capek. In the play, a man makes a machine that can think, which he calls a robot and which ends up killing its owner. In the 1940s, the American science fiction writer Isaac Asimov wrote a series of stories about robots and invented the term robotics, the science of robots. Meanwhile, in the real world, the first robots were developed by an engineer, Joseph F. Engelberger, and an inventor, George C. Devol. Together they started Unimation, a manufacturing company that produced the first real robot in 1961, called the Unimate. Robots of this type were installed at a General Motors automobile plant and proved to be a success. They worked reliably and saved money for General Motors, so other companies were soon acquiring robots as well.
These industrial robots were nothing like the terrifying creatures that can often be seen in science fiction films. In fact, these robots looked and behaved nothing like humans. They were simply pieces of computer-controlled machinery, with metal «arms» or «hands.» Since they were made of metal, they could perform certain jobs that were difficult or dangerous for humans, particularly jobs that involve high heat. And since robots were tireless and never got hungry, sleepy, or distracted, they were useful for tasks that would be tiring or boring for humans. Industrial robots have been improved over the years, and today they are used in many factories around the world. Though the use of robots has meant the loss of some jobs, at the same time other jobs have been created in the design, development, and production of the robots.
• Outside of industry, robots have also been developed and put to use by governments and scientists in situations where humans might be in danger. For example, they can be sent in to investigate an unexploded bomb or an accident at a nuclear power plant. B• In space exploration, robots have performed many key tasks where humans could not be present, such as on the surface of Mars. C• In 2004, two robotic Rovers-small six-wheeled computerized cars-were sent to Mars. D•
Câu 1: When did the word «robot» appear?
A. in the 1920s
B. in the 40s
C. in the 60s
D. in the 19th century
-
Đáp án : A
(0) bình luận (0) lời giải
Giải chi tiết:
Lời giải sai
Bình thường
Khá hay
Rất Hay
Câu 2: What can be said about Karel Capek?
A. He is an writer
B. He was the first to create the word «robot».
C. He made a robot.
D. He made a robot in order to kill a person.
-
Đáp án : B
(0) bình luận (0) lời giải
Giải chi tiết:
Lời giải sai
Bình thường
Khá hay
Rất Hay
Câu 3: What is Unimation?
A. It’s the name of a robot.
B. It’s the producer of the first robot.
C. It’s a robot making programme.
D. It’s the name of a robot inventor.
-
Đáp án : B
(0) bình luận (0) lời giải
Giải chi tiết:
Lời giải sai
Bình thường
Khá hay
Rất Hay
Câu 4: What are industrial robots like?
A. They look like humans.
B. They behave like humans.
C. They are computer-controlled machines.
D. They controlled machinery.
-
Đáp án : C
(0) bình luận (0) lời giải
Giải chi tiết:
Lời giải sai
Bình thường
Khá hay
Rất Hay
Câu 5: Which of the following is NOT mentioned as a characteristic of robots?
A. They don’t need food.
B. They are not distracted.
C. They are tiring.
D. They can do jobs involving high heat.
-
Đáp án : C
(0) bình luận (0) lời giải
Giải chi tiết:
Lời giải sai
Bình thường
Khá hay
Rất Hay
Câu 6: What can be said about robots?
A. They take away some jobs but offer some in return.
B. Their appearance negatively affects the job market.
C. They put jobs in relation to designers in danger.
D. They develop weapon industry.
-
Đáp án : A
(0) bình luận (0) lời giải
Giải chi tiết:
Lời giải sai
Bình thường
Khá hay
Rất Hay
Câu 7: Outside of industry, how are robots used?
A. to replace humans in dangerous jobs
B. to work in nuclear plants
C. to be performers in key shows
D. to investigate unexploded bombs
-
Đáp án : A
(0) bình luận (0) lời giải
Giải chi tiết:
Lời giải sai
Bình thường
Khá hay
Rất Hay
Câu 8: Look at the gaps • in the final paragraph of the passage. Where does the following sentence best fit? «Researchers also use robots to collect samples of hot rocks or gases in active volcanoes».
A. A
B. B
C. C
D. D
-
Đáp án : B
(0) bình luận (0) lời giải
Giải chi tiết:
Lời giải sai
Bình thường
Khá hay
Rất Hay
Câu 9: Which of the following best paraphrases the final sentence of the first paragraph (in italics)?
A. Because robots were reliable and economical to General Motors, other companies started to use robots.
B. Other companies produced reliable and efficient robots for General Motors.
C. Robots saved money for all companies that used them.
D. Robots only worked well for General Motors.
-
Đáp án : A
(0) bình luận (0) lời giải
Giải chi tiết:
Lời giải sai
Bình thường
Khá hay
Rất Hay
Câu 10: What is the author’s attitude towards robots?
A. He appreciates them.
B. He dislikes them.
C. He thinks they are a nuisance.
D. They annoy him.
-
Đáp án : A
(0) bình luận (0) lời giải
Giải chi tiết:
Lời giải sai
Bình thường
Khá hay
Rất Hay
>> Luyện thi TN THPT & ĐH năm 2023 trên trang trực tuyến Tuyensinh247.com. Học mọi lúc, mọi nơi với Thầy Cô giáo giỏi, đầy đủ các khoá: Nền tảng lớp 12; Luyện thi chuyên sâu; Luyện đề đủ dạng; Tổng ôn chọn lọc.
This article is about mechanical robots. For software agents, see Bot. For other uses of the term, see Robot (disambiguation).



A robot is a machine—especially one programmable by a computer—capable of carrying out a complex series of actions automatically.[2] A robot can be guided by an external control device, or the control may be embedded within. Robots may be constructed to evoke human form, but most robots are task-performing machines, designed with an emphasis on stark functionality, rather than expressive aesthetics.
Robots can be autonomous or semi-autonomous and range from humanoids such as Honda’s Advanced Step in Innovative Mobility (ASIMO) and TOSY’s TOSY Ping Pong Playing Robot (TOPIO) to industrial robots, medical operating robots, patient assist robots, dog therapy robots, collectively programmed swarm robots, UAV drones such as General Atomics MQ-1 Predator, and even microscopic nano robots. By mimicking a lifelike appearance or automating movements, a robot may convey a sense of intelligence or thought of its own. Autonomous things are expected to proliferate in the future, with home robotics and the autonomous car as some of the main drivers.[3]
The branch of technology that deals with the design, construction, operation, and application of robots,[4] as well as computer systems for their control, sensory feedback, and information processing is robotics. These technologies deal with automated machines that can take the place of humans in dangerous environments or manufacturing processes, or resemble humans in appearance, behavior, or cognition. Many of today’s robots are inspired by nature contributing to the field of bio-inspired robotics. These robots have also created a newer branch of robotics: soft robotics.
From the time of ancient civilization, there have been many accounts of user-configurable automated devices and even automata resembling humans and other animals, such as animatronics, designed primarily as entertainment. As mechanical techniques developed through the Industrial age, there appeared more practical applications such as automated machines, remote-control and wireless remote-control.
The term comes from a Slavic root, robot-, with meanings associated with labor. The word ‘robot’ was first used to denote a fictional humanoid in a 1920 Czech-language play R.U.R. (Rossumovi Univerzální Roboti – Rossum’s Universal Robots) by Karel Čapek, though it was Karel’s brother Josef Čapek who was the word’s true inventor.[5][6][7] Electronics evolved into the driving force of development with the advent of the first electronic autonomous robots created by William Grey Walter in Bristol, England in 1948, as well as Computer Numerical Control (CNC) machine tools in the late 1940s by John T. Parsons and Frank L. Stulen.
The first modern digital and programmable robot was invented by George Devol in 1954 and spawned his seminal robotics company, Unimation. The first Unimate was sold to General Motors in 1961 where it lifted pieces of hot metal from die casting machines at the Inland Fisher Guide Plant in the West Trenton section of Ewing Township, New Jersey.[8]
Robots have replaced humans[9] in performing repetitive and dangerous tasks which humans prefer not to do, or are unable to do because of size limitations, or which take place in extreme environments such as outer space or the bottom of the sea. There are concerns about the increasing use of robots and their role in society. Robots are blamed for rising technological unemployment as they replace workers in increasing numbers of functions.[10] The use of robots in military combat raises ethical concerns. The possibilities of robot autonomy and potential repercussions have been addressed in fiction and may be a realistic concern in the future.
Summary

KITT (a fictional robot) is mentally anthropomorphic; it thinks like a human.

iCub is physically anthropomorphic; it looks like a human.
The word robot can refer to both physical robots and virtual software agents, but the latter are usually referred to as bots.[11] There is no consensus on which machines qualify as robots but there is general agreement among experts, and the public, that robots tend to possess some or all of the following abilities and functions: accept electronic programming, process data or physical perceptions electronically, operate autonomously to some degree, move around, operate physical parts of itself or physical processes, sense and manipulate their environment, and exhibit intelligent behavior, especially behavior which mimics humans or other animals.[12][13] Related to the concept of a robot is the field of synthetic biology, which studies entities whose nature is more comparable to living things than to machines.
History
The idea of automata originates in the mythologies of many cultures around the world. Engineers and inventors from ancient civilizations, including Ancient China,[14] Ancient Greece, and Ptolemaic Egypt,[15] attempted to build self-operating machines, some resembling animals and humans. Early descriptions of automata include the artificial doves of Archytas,[16] the artificial birds of Mozi and Lu Ban,[17] a «speaking» automaton by Hero of Alexandria, a washstand automaton by Philo of Byzantium, and a human automaton described in the Lie Zi.[14]
Early beginnings
Many ancient mythologies, and most modern religions include artificial people, such as the mechanical servants built by the Greek god Hephaestus[18] (Vulcan to the Romans), the clay golems of Jewish legend and clay giants of Norse legend, and Galatea, the mythical statue of Pygmalion that came to life. Since circa 400 BC, myths of Crete include Talos, a man of bronze who guarded the island from pirates.
In ancient Greece, the Greek engineer Ctesibius (c. 270 BC) «applied a knowledge of pneumatics and hydraulics to produce the first organ and water clocks with moving figures.»[19]: 2 [20] In the 4th century BC, the Greek mathematician Archytas of Tarentum postulated a mechanical steam-operated bird he called «The Pigeon». Hero of Alexandria (10–70 AD), a Greek mathematician and inventor, created numerous user-configurable automated devices, and described machines powered by air pressure, steam and water.[21]
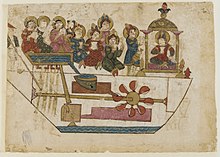
Al-Jazari – a musical toy
The 11th century Lokapannatti tells of how the Buddha’s relics were protected by mechanical robots (bhuta vahana yanta), from the kingdom of Roma visaya (Rome); until they were disarmed by King Ashoka.[22]
In ancient China, the 3rd-century text of the Lie Zi describes an account of humanoid automata, involving a much earlier encounter between Chinese emperor King Mu of Zhou and a mechanical engineer known as Yan Shi, an ‘artificer’. Yan Shi proudly presented the king with a life-size, human-shaped figure of his mechanical ‘handiwork’ made of leather, wood, and artificial organs.[14] There are also accounts of flying automata in the Han Fei Zi and other texts, which attributes the 5th century BC Mohist philosopher Mozi and his contemporary Lu Ban with the invention of artificial wooden birds (ma yuan) that could successfully fly.[17]

Su Song’s astronomical clock tower showing the mechanical figurines which chimed the hours
In 1066, the Chinese inventor Su Song built a water clock in the form of a tower which featured mechanical figurines which chimed the hours.[23][24][25] His mechanism had a programmable drum machine with pegs (cams) that bumped into little levers that operated percussion instruments. The drummer could be made to play different rhythms and different drum patterns by moving the pegs to different locations.[25]
Samarangana Sutradhara, a Sanskrit treatise by Bhoja (11th century), includes a chapter about the construction of mechanical contrivances (automata), including mechanical bees and birds, fountains shaped like humans and animals, and male and female dolls that refilled oil lamps, danced, played instruments, and re-enacted scenes from Hindu mythology.[26][27][28]
13th century Muslim Scientist Ismail al-Jazari created several automated devices. He built automated moving peacocks driven by hydropower.[29] He also invented the earliest known automatic gates, which were driven by hydropower,[30] created automatic doors as part of one of his elaborate water clocks.[31] One of al-Jazari’s humanoid automata was a waitress that could serve water, tea or drinks. The drink was stored in a tank with a reservoir from where the drink drips into a bucket and, after seven minutes, into a cup, after which the waitress appears out of an automatic door serving the drink.[32] Al-Jazari invented a hand washing automaton incorporating a flush mechanism now used in modern flush toilets. It features a female humanoid automaton standing by a basin filled with water. When the user pulls the lever, the water drains and the female automaton refills the basin.[19]
Mark E. Rosheim summarizes the advances in robotics made by Muslim engineers, especially al-Jazari, as follows:
Unlike the Greek designs, these Arab examples reveal an interest, not only in dramatic illusion, but in manipulating the environment for human comfort. Thus, the greatest contribution the Arabs made, besides preserving, disseminating and building on the work of the Greeks, was the concept of practical application. This was the key element that was missing in Greek robotic science.[19]: 9

In the 14th century, the coronation of Richard II of England featured an automata angel.[34]
In Renaissance Italy, Leonardo da Vinci (1452–1519) sketched plans for a humanoid robot around 1495. Da Vinci’s notebooks, rediscovered in the 1950s, contained detailed drawings of a mechanical knight now known as Leonardo’s robot, able to sit up, wave its arms and move its head and jaw.[35] The design was probably based on anatomical research recorded in his Vitruvian Man. It is not known whether he attempted to build it. According to Encyclopædia Britannica, Leonardo da Vinci may have been influenced by the classic automata of al-Jazari.[29]
In Japan, complex animal and human automata were built between the 17th to 19th centuries, with many described in the 18th century Karakuri zui (Illustrated Machinery, 1796). One such automaton was the karakuri ningyō, a mechanized puppet.[36] Different variations of the karakuri existed: the Butai karakuri, which were used in theatre, the Zashiki karakuri, which were small and used in homes, and the Dashi karakuri which were used in religious festivals, where the puppets were used to perform reenactments of traditional myths and legends.
In France, between 1738 and 1739, Jacques de Vaucanson exhibited several life-sized automatons: a flute player, a pipe player and a duck. The mechanical duck could flap its wings, crane its neck, and swallow food from the exhibitor’s hand, and it gave the illusion of digesting its food by excreting matter stored in a hidden compartment.[37] About 30 years later in Switzerland the clockmaker Pierre Jaquet-Droz made several complex mechanical figures that could write and play music. Several of these devices still exist and work.[38]
Remote-controlled systems
Remotely operated vehicles were demonstrated in the late 19th century in the form of several types of remotely controlled torpedoes. The early 1870s saw remotely controlled torpedoes by John Ericsson (pneumatic), John Louis Lay (electric wire guided), and Victor von Scheliha (electric wire guided).[39]
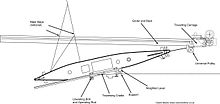
The Brennan torpedo, invented by Louis Brennan in 1877, was powered by two contra-rotating propellers that were spun by rapidly pulling out wires from drums wound inside the torpedo. Differential speed on the wires connected to the shore station allowed the torpedo to be guided to its target, making it «the world’s first practical guided missile».[40] In 1897 the British inventor Ernest Wilson was granted a patent for a torpedo remotely controlled by «Hertzian» (radio) waves[41][42] and in 1898 Nikola Tesla publicly demonstrated a wireless-controlled torpedo that he hoped to sell to the US Navy.[43][44]
In 1903, the Spanish engineer Leonardo Torres y Quevedo demonstrated a radio control system called «Telekino«, which he wanted to use to control an airship of his own design. Unlike the previous systems, which carried out actions of the ‘on/off’ type, Torres device was able to memorize the signals received to execute the operations on its own and could carry out to 19 different orders.[45][46]
Archibald Low, known as the «father of radio guidance systems» for his pioneering work on guided rockets and planes during the First World War. In 1917, he demonstrated a remote controlled aircraft to the Royal Flying Corps and in the same year built the first wire-guided rocket.
Early robots

W. H. Richards with «George», 1932
In 1928, one of the first humanoid robots, Eric, was exhibited at the annual exhibition of the Model Engineers Society in London, where it delivered a speech. Invented by W. H. Richards, the robot’s frame consisted of an aluminium body of armour with eleven electromagnets and one motor powered by a twelve-volt power source. The robot could move its hands and head and could be controlled through remote control or voice control.[47] Both Eric and his «brother» George toured the world.[48]
Westinghouse Electric Corporation built Televox in 1926; it was a cardboard cutout connected to various devices which users could turn on and off. In 1939, the humanoid robot known as Elektro was debuted at the 1939 New York World’s Fair.[49][50] Seven feet tall (2.1 m) and weighing 265 pounds (120.2 kg), it could walk by voice command, speak about 700 words (using a 78-rpm record player), smoke cigarettes, blow up balloons, and move its head and arms. The body consisted of a steel gear, cam and motor skeleton covered by an aluminum skin. In 1928, Japan’s first robot, Gakutensoku, was designed and constructed by biologist Makoto Nishimura.
Modern autonomous robots
The first electronic autonomous robots with complex behaviour were created by William Grey Walter of the Burden Neurological Institute at Bristol, England in 1948 and 1949. He wanted to prove that rich connections between a small number of brain cells could give rise to very complex behaviors – essentially that the secret of how the brain worked lay in how it was wired up. His first robots, named Elmer and Elsie, were constructed between 1948 and 1949 and were often described as tortoises due to their shape and slow rate of movement. The three-wheeled tortoise robots were capable of phototaxis, by which they could find their way to a recharging station when they ran low on battery power.
Walter stressed the importance of using purely analogue electronics to simulate brain processes at a time when his contemporaries such as Alan Turing and John von Neumann were all turning towards a view of mental processes in terms of digital computation. His work inspired subsequent generations of robotics researchers such as Rodney Brooks, Hans Moravec and Mark Tilden. Modern incarnations of Walter’s turtles may be found in the form of BEAM robotics.[51]

The first digitally operated and programmable robot was invented by George Devol in 1954 and was ultimately called the Unimate. This ultimately laid the foundations of the modern robotics industry.[52] Devol sold the first Unimate to General Motors in 1960, and it was installed in 1961 in a plant in Trenton, New Jersey to lift hot pieces of metal from a die casting machine and stack them.[53] Devol’s patent for the first digitally operated programmable robotic arm represents the foundation of the modern robotics industry.[54]
The first palletizing robot was introduced in 1963 by the Fuji Yusoki Kogyo Company.[55] In 1973, a robot with six electromechanically driven axes was patented[56][57][58] by KUKA robotics in Germany, and the programmable universal manipulation arm was invented by Victor Scheinman in 1976, and the design was sold to Unimation.
Commercial and industrial robots are now in widespread use performing jobs more cheaply or with greater accuracy and reliability than humans. They are also employed for jobs which are too dirty, dangerous or dull to be suitable for humans. Robots are widely used in manufacturing, assembly and packing, transport, earth and space exploration, surgery, weaponry, laboratory research, and mass production of consumer and industrial goods.[59]
Future development and trends
| External video |
|---|
Various techniques have emerged to develop the science of robotics and robots. One method is evolutionary robotics, in which a number of differing robots are submitted to tests. Those which perform best are used as a model to create a subsequent «generation» of robots. Another method is developmental robotics, which tracks changes and development within a single robot in the areas of problem-solving and other functions. Another new type of robot is just recently introduced which acts both as a smartphone and robot and is named RoboHon.[60]
As robots become more advanced, eventually there may be a standard computer operating system designed mainly for robots. Robot Operating System (ROS) is an open-source software set of programs being developed at Stanford University, the Massachusetts Institute of Technology, and the Technical University of Munich, Germany, among others. ROS provides ways to program a robot’s navigation and limbs regardless of the specific hardware involved. It also provides high-level commands for items like image recognition and even opening doors. When ROS boots up on a robot’s computer, it would obtain data on attributes such as the length and movement of robots’ limbs. It would relay this data to higher-level algorithms. Microsoft is also developing a «Windows for robots» system with its Robotics Developer Studio, which has been available since 2007.[61]
Japan hopes to have full-scale commercialization of service robots by 2025. Much technological research in Japan is led by Japanese government agencies, particularly the Trade Ministry.[62]
Many future applications of robotics seem obvious to people, even though they are well beyond the capabilities of robots available at the time of the prediction.[63][64] As early as 1982 people were confident that someday robots would:[65] 1. Clean parts by removing molding flash 2. Spray paint automobiles with absolutely no human presence 3. Pack things in boxes—for example, orient and nest chocolate candies in candy boxes 4. Make electrical cable harness 5. Load trucks with boxes—a packing problem 6. Handle soft goods, such as garments and shoes 7. Shear sheep 8. prosthesis 9. Cook fast food and work in other service industries 10. Household robot.
Generally such predictions are overly optimistic in timescale.
New functionalities and prototypes
|
|
This section needs to be updated. Please help update this article to reflect recent events or newly available information. (August 2021) |
In 2008, Caterpillar Inc. developed a dump truck which can drive itself without any human operator.[66] Many analysts believe that self-driving trucks may eventually revolutionize logistics.[67] By 2014, Caterpillar had a self-driving dump truck which is expected to greatly change the process of mining. In 2015, these Caterpillar trucks were actively used in mining operations in Australia by the mining company Rio Tinto Coal Australia.[68][69][70][71] Some analysts believe that within the next few decades, most trucks will be self-driving.[72]
A literate or ‘reading robot’ named Marge has intelligence that comes from software. She can read newspapers, find and correct misspelled words, learn about banks like Barclays, and understand that some restaurants are better places to eat than others.[73]
Baxter is a new robot introduced in 2012 which learns by guidance. A worker could teach Baxter how to perform a task by moving its hands in the desired motion and having Baxter memorize them. Extra dials, buttons, and controls are available on Baxter’s arm for more precision and features. Any regular worker could program Baxter and it only takes a matter of minutes, unlike usual industrial robots that take extensive programs and coding to be used. This means Baxter needs no programming to operate. No software engineers are needed. This also means Baxter can be taught to perform multiple, more complicated tasks. Sawyer was added in 2015 for smaller, more precise tasks.[74]
Prototype cooking robots have been developed and could be programmed for autonomous, dynamic and adjustable preparation of discrete meals.[75][76]
Etymology

The word robot was introduced to the public by the Czech interwar writer Karel Čapek in his play R.U.R. (Rossum’s Universal Robots), published in 1920.[6] The play begins in a factory that uses a chemical substitute for protoplasm to manufacture living, simplified people called robots. The play does not focus in detail on the technology behind the creation of these living creatures, but in their appearance they prefigure modern ideas of androids, creatures who can be mistaken for humans. These mass-produced workers are depicted as efficient but emotionless, incapable of original thinking and indifferent to self-preservation. At issue is whether the robots are being exploited and the consequences of human dependence upon commodified labor (especially after a number of specially-formulated robots achieve self-awareness and incite robots all around the world to rise up against the humans).
Karel Čapek himself did not coin the word. He wrote a short letter in reference to an etymology in the Oxford English Dictionary in which he named his brother, the painter and writer Josef Čapek, as its actual originator.[6]
In an article in the Czech journal Lidové noviny in 1933, he explained that he had originally wanted to call the creatures laboři («workers», from Latin labor). However, he did not like the word, and sought advice from his brother Josef, who suggested «roboti». The word robota means literally «corvée», «serf labor», and figuratively «drudgery» or «hard work» in Czech and also (more general) «work», «labor» in many Slavic languages (e.g.: Bulgarian, Russian, Serbian, Slovak, Polish, Macedonian, Ukrainian, archaic Czech, as well as robot in Hungarian). Traditionally the robota (Hungarian robot) was the work period a serf (corvée) had to give for his lord, typically 6 months of the year. The origin of the word is the Old Church Slavonic rabota «servitude» («work» in contemporary Bulgarian, Macedonian and Russian), which in turn comes from the Proto-Indo-European root *orbh-. Robot is cognate with the German root Arbeit (work).[77][78]
English pronunciation of the word has evolved relatively quickly since its introduction. In the U.S. during the late ’30s to early ’40s the second syllable was pronounced with a long «O» like «row-boat.»[79][better source needed] By the late ’50s to early ’60s, some were pronouncing it with a short «U» like «row-but» while others used a softer «O» like «row-bought.»[80] By the ’70s, its current pronunciation «row-bot» had become predominant.
The word robotics, used to describe this field of study,[4] was coined by the science fiction writer Isaac Asimov. Asimov created the «Three Laws of Robotics» which are a recurring theme in his books. These have since been used by many others to define laws used in fiction. (The three laws are pure fiction, and no technology yet created has the ability to understand or follow them, and in fact most robots serve military purposes, which run quite contrary to the first law and often the third law. «People think about Asimov’s laws, but they were set up to point out how a simple ethical system doesn’t work. If you read the short stories, every single one is about a failure, and they are totally impractical,» said Dr. Joanna Bryson of the University of Bath.[81])
Modern robots

Mobile robot
Mobile robots[82] have the capability to move around in their environment and are not fixed to one physical location. An example of a mobile robot that is in common use today is the automated guided vehicle or automatic guided vehicle (AGV). An AGV is a mobile robot that follows markers or wires in the floor, or uses vision or lasers.[83] AGVs are discussed later in this article.
Mobile robots are also found in industry, military and security environments.[84] They also appear as consumer products, for entertainment or to perform certain tasks like vacuum cleaning. Mobile robots are the focus of a great deal of current research and almost every major university has one or more labs that focus on mobile robot research.[85]
Mobile robots are usually used in tightly controlled environments such as on assembly lines because they have difficulty responding to unexpected interference. Because of this most humans rarely encounter robots. However domestic robots for cleaning and maintenance are increasingly common in and around homes in developed countries. Robots can also be found in military applications.[86]
Industrial robots (manipulating)

A pick and place robot in a factory
Industrial robots usually consist of a jointed arm (multi-linked manipulator) and an end effector that is attached to a fixed surface. One of the most common type of end effector is a gripper assembly.
The International Organization for Standardization gives a definition of a manipulating industrial robot in ISO 8373:
«an automatically controlled, reprogrammable, multipurpose, manipulator programmable in three or more axes, which may be either fixed in place or mobile for use in industrial automation applications.»[87]
This definition is used by the International Federation of Robotics, the European Robotics Research Network (EURON) and many national standards committees.[88]
Service robot
Most commonly industrial robots are fixed robotic arms and manipulators used primarily for production and distribution of goods. The term «service robot» is less well-defined. The International Federation of Robotics has proposed a tentative definition, «A service robot is a robot which operates semi- or fully autonomously to perform services useful to the well-being of humans and equipment, excluding manufacturing operations.»[89]
Educational (interactive) robots
Robots are used as educational assistants to teachers. From the 1980s, robots such as turtles were used in schools and programmed using the Logo language.[90][91]
There are robot kits like Lego Mindstorms, BIOLOID, OLLO from ROBOTIS, or BotBrain Educational Robots can help children to learn about mathematics, physics, programming, and electronics. Robotics have also been introduced into the lives of elementary and high school students in the form of robot competitions with the company FIRST (For Inspiration and Recognition of Science and Technology). The organization is the foundation for the FIRST Robotics Competition, FIRST Tech Challenge, FIRST Lego League Challenge and FIRST Lego League Explore competitions.
There have also been robots such as the teaching computer, Leachim (1974).[92] Leachim was an early example of speech synthesis using the using the Diphone synthesis method. 2-XL (1976) was a robot shaped game / teaching toy based on branching between audible tracks on an 8-track tape player, both invented by Michael J. Freeman.[93] Later, the 8-track was upgraded to tape cassettes and then to digital.
Modular robot
Modular robots are a new breed of robots that are designed to increase the use of robots by modularizing their architecture.[94] The functionality and effectiveness of a modular robot is easier to increase compared to conventional robots. These robots are composed of a single type of identical, several different identical module types, or similarly shaped modules, which vary in size. Their architectural structure allows hyper-redundancy for modular robots, as they can be designed with more than 8 degrees of freedom (DOF). Creating the programming, inverse kinematics and dynamics for modular robots is more complex than with traditional robots. Modular robots may be composed of L-shaped modules, cubic modules, and U and H-shaped modules. ANAT technology, an early modular robotic technology patented by Robotics Design Inc., allows the creation of modular robots from U and H shaped modules that connect in a chain, and are used to form heterogeneous and homogenous modular robot systems. These «ANAT robots» can be designed with «n» DOF as each module is a complete motorized robotic system that folds relatively to the modules connected before and after it in its chain, and therefore a single module allows one degree of freedom. The more modules that are connected to one another, the more degrees of freedom it will have. L-shaped modules can also be designed in a chain, and must become increasingly smaller as the size of the chain increases, as payloads attached to the end of the chain place a greater strain on modules that are further from the base. ANAT H-shaped modules do not suffer from this problem, as their design allows a modular robot to distribute pressure and impacts evenly amongst other attached modules, and therefore payload-carrying capacity does not decrease as the length of the arm increases. Modular robots can be manually or self-reconfigured to form a different robot, that may perform different applications. Because modular robots of the same architecture type are composed of modules that compose different modular robots, a snake-arm robot can combine with another to form a dual or quadra-arm robot, or can split into several mobile robots, and mobile robots can split into multiple smaller ones, or combine with others into a larger or different one. This allows a single modular robot the ability to be fully specialized in a single task, as well as the capacity to be specialized to perform multiple different tasks.
Modular robotic technology is currently being applied in hybrid transportation,[95] industrial automation,[96] duct cleaning[97] and handling. Many research centres and universities have also studied this technology, and have developed prototypes.
Collaborative robots
A collaborative robot or cobot is a robot that can safely and effectively interact with human workers while performing simple industrial tasks. However, end-effectors and other environmental conditions may create hazards, and as such risk assessments should be done before using any industrial motion-control application.[98]
The collaborative robots most widely used in industries today are manufactured by Universal Robots in Denmark.[99]
Rethink Robotics—founded by Rodney Brooks, previously with iRobot—introduced Baxter in September 2012; as an industrial robot designed to safely interact with neighboring human workers, and be programmable for performing simple tasks.[100] Baxters stop if they detect a human in the way of their robotic arms and have prominent off switches. Intended for sale to small businesses, they are promoted as the robotic analogue of the personal computer.[101] As of May 2014, 190 companies in the US have bought Baxters and they are being used commercially in the UK.[10]
Robots in society

Roughly half of all the robots in the world are in Asia, 32% in Europe, and 16% in North America, 1% in Australasia and 1% in Africa.[104] 40% of all the robots in the world are in Japan,[105] making Japan the country with the highest number of robots.
Autonomy and ethical questions

An android, or robot designed to resemble a human, can appear comforting to some people and disturbing to others.[106]
As robots have become more advanced and sophisticated, experts and academics have increasingly explored the questions of what ethics might govern robots’ behavior,[107][108] and whether robots might be able to claim any kind of social, cultural, ethical or legal rights.[109] One scientific team has said that it was possible that a robot brain would exist by 2019.[110] Others predict robot intelligence breakthroughs by 2050.[111] Recent advances have made robotic behavior more sophisticated.[112] The social impact of intelligent robots is subject of a 2010 documentary film called Plug & Pray.[113]
Vernor Vinge has suggested that a moment may come when computers and robots are smarter than humans. He calls this «the Singularity».[114] He suggests that it may be somewhat or possibly very dangerous for humans.[115] This is discussed by a philosophy called Singularitarianism.
In 2009, experts attended a conference hosted by the Association for the Advancement of Artificial Intelligence (AAAI) to discuss whether computers and robots might be able to acquire any autonomy, and how much these abilities might pose a threat or hazard. They noted that some robots have acquired various forms of semi-autonomy, including being able to find power sources on their own and being able to independently choose targets to attack with weapons. They also noted that some computer viruses can evade elimination and have achieved «cockroach intelligence.» They noted that self-awareness as depicted in science-fiction is probably unlikely, but that there were other potential hazards and pitfalls.[114] Various media sources and scientific groups have noted separate trends in differing areas which might together result in greater robotic functionalities and autonomy, and which pose some inherent concerns.[116][117][118]
Military robots
Some experts and academics have questioned the use of robots for military combat, especially when such robots are given some degree of autonomous functions.[119] There are also concerns about technology which might allow some armed robots to be controlled mainly by other robots.[120] The US Navy has funded a report which indicates that, as military robots become more complex, there should be greater attention to implications of their ability to make autonomous decisions.[121][122] One researcher states that autonomous robots might be more humane, as they could make decisions more effectively. However, other experts question this.[123]
One robot in particular, the EATR, has generated public concerns[124] over its fuel source, as it can continually refuel itself using organic substances.[125] Although the engine for the EATR is designed to run on biomass and vegetation[126] specifically selected by its sensors, which it can find on battlefields or other local environments, the project has stated that chicken fat can also be used.[127]
Manuel De Landa has noted that «smart missiles» and autonomous bombs equipped with artificial perception can be considered robots, as they make some of their decisions autonomously. He believes this represents an important and dangerous trend in which humans are handing over important decisions to machines.[128]
Relationship to unemployment
For centuries, people have predicted that machines would make workers obsolete and increase unemployment, although the causes of unemployment are usually thought to be due to social policy.[129][130][131]
A recent example of human replacement involves Taiwanese technology company Foxconn who, in July 2011, announced a three-year plan to replace workers with more robots. At present the company uses ten thousand robots but will increase them to a million robots over a three-year period.[132]
Lawyers have speculated that an increased prevalence of robots in the workplace could lead to the need to improve redundancy laws.[133]
Kevin J. Delaney said «Robots are taking human jobs. But Bill Gates believes that governments should tax companies’ use of them, as a way to at least temporarily slow the spread of automation and to fund other types of employment.»[134] The robot tax would also help pay a guaranteed living wage to the displaced workers.
The World Bank’s World Development Report 2019 puts forth evidence showing that while automation displaces workers, technological innovation creates more new industries and jobs on balance.[135]
Contemporary uses

A general-purpose robot acts as a guide during the day and a security guard at night.
At present, there are two main types of robots, based on their use: general-purpose autonomous robots and dedicated robots.
Robots can be classified by their specificity of purpose. A robot might be designed to perform one particular task extremely well, or a range of tasks less well. All robots by their nature can be re-programmed to behave differently, but some are limited by their physical form. For example, a factory robot arm can perform jobs such as cutting, welding, gluing, or acting as a fairground ride, while a pick-and-place robot can only populate printed circuit boards.
General-purpose autonomous robots
General-purpose autonomous robots can perform a variety of functions independently. General-purpose autonomous robots typically can navigate independently in known spaces, handle their own re-charging needs, interface with electronic doors and elevators and perform other basic tasks. Like computers, general-purpose robots can link with networks, software and accessories that increase their usefulness. They may recognize people or objects, talk, provide companionship, monitor environmental quality, respond to alarms, pick up supplies and perform other useful tasks. General-purpose robots may perform a variety of functions simultaneously or they may take on different roles at different times of day. Some such robots try to mimic human beings and may even resemble people in appearance; this type of robot is called a humanoid robot. Humanoid robots are still in a very limited stage, as no humanoid robot can, as of yet, actually navigate around a room that it has never been in.[136] Thus, humanoid robots are really quite limited, despite their intelligent behaviors in their well-known environments.
Factory robots
Car production
Over the last three decades, automobile factories have become dominated by robots. A typical factory contains hundreds of industrial robots working on fully automated production lines, with one robot for every ten human workers. On an automated production line, a vehicle chassis on a conveyor is welded, glued, painted and finally assembled at a sequence of robot stations.
Packaging
Industrial robots are also used extensively for palletizing and packaging of manufactured goods, for example for rapidly taking drink cartons from the end of a conveyor belt and placing them into boxes, or for loading and unloading machining centers.
Electronics
Mass-produced printed circuit boards (PCBs) are almost exclusively manufactured by pick-and-place robots, typically with SCARA manipulators, which remove tiny electronic components from strips or trays, and place them on to PCBs with great accuracy.[137] Such robots can place hundreds of thousands of components per hour, far out-performing a human in speed, accuracy, and reliability.[138]
Automated guided vehicles (AGVs)

An intelligent AGV drops-off goods without needing lines or beacons in the workspace.
Mobile robots, following markers or wires in the floor, or using vision[83] or lasers, are used to transport goods around large facilities, such as warehouses, container ports, or hospitals.[139]
Early AGV-style robots
Limited to tasks that could be accurately defined and had to be performed the same way every time. Very little feedback or intelligence was required, and the robots needed only the most basic exteroceptors (sensors). The limitations of these AGVs are that their paths are not easily altered and they cannot alter their paths if obstacles block them. If one AGV breaks down, it may stop the entire operation.
Interim AGV technologies
Developed to deploy triangulation from beacons or bar code grids for scanning on the floor or ceiling. In most factories, triangulation systems tend to require moderate to high maintenance, such as daily cleaning of all beacons or bar codes. Also, if a tall pallet or large vehicle blocks beacons or a bar code is marred, AGVs may become lost. Often such AGVs are designed to be used in human-free environments.
Intelligent AGVs (i-AGVs)
Such as SmartLoader,[140] SpeciMinder,[141] ADAM,[142] Tug[143] Eskorta,[144] and MT 400 with Motivity[145] are designed for people-friendly workspaces. They navigate by recognizing natural features. 3D scanners or other means of sensing the environment in two or three dimensions help to eliminate cumulative errors in dead-reckoning calculations of the AGV’s current position. Some AGVs can create maps of their environment using scanning lasers with simultaneous localization and mapping (SLAM) and use those maps to navigate in real time with other path planning and obstacle avoidance algorithms. They are able to operate in complex environments and perform non-repetitive and non-sequential tasks such as transporting photomasks in a semiconductor lab, specimens in hospitals and goods in warehouses. For dynamic areas, such as warehouses full of pallets, AGVs require additional strategies using three-dimensional sensors such as time-of-flight or stereovision cameras.
Dirty, dangerous, dull, or inaccessible tasks
There are many jobs that humans would rather leave to robots. The job may be boring, such as domestic cleaning or sports field line marking, or dangerous, such as exploring inside a volcano.[146] Other jobs are physically inaccessible, such as exploring another planet,[147] cleaning the inside of a long pipe, or performing laparoscopic surgery.[148]
Space probes
Almost every unmanned space probe ever launched was a robot.[149][150] Some were launched in the 1960s with very limited abilities, but their ability to fly and land (in the case of Luna 9) is an indication of their status as a robot. This includes the Voyager probes and the Galileo probes, among others.
Telerobots

Teleoperated robots, or telerobots, are devices remotely operated from a distance by a human operator rather than following a predetermined sequence of movements, but which has semi-autonomous behaviour. They are used when a human cannot be present on site to perform a job because it is dangerous, far away, or inaccessible. The robot may be in another room or another country, or may be on a very different scale to the operator. For instance, a laparoscopic surgery robot allows the surgeon to work inside a human patient on a relatively small scale compared to open surgery, significantly shortening recovery time.[148] They can also be used to avoid exposing workers to the hazardous and tight spaces such as in duct cleaning. When disabling a bomb, the operator sends a small robot to disable it. Several authors have been using a device called the Longpen to sign books remotely.[151] Teleoperated robot aircraft, like the Predator Unmanned Aerial Vehicle, are increasingly being used by the military. These pilotless drones can search terrain and fire on targets.[152][153] Hundreds of robots such as iRobot’s Packbot and the Foster-Miller TALON are being used in Iraq and Afghanistan by the U.S. military to defuse roadside bombs or improvised explosive devices (IEDs) in an activity known as explosive ordnance disposal (EOD).[154]
Automated fruit harvesting machines
Robots are used to automate picking fruit on orchards at a cost lower than that of human pickers.
Domestic robots

Domestic robots are simple robots dedicated to a single task work in home use. They are used in simple but often disliked jobs, such as vacuum cleaning, floor washing, and lawn mowing. An example of a domestic robot is a Roomba.
Military robots
Military robots include the SWORDS robot which is currently used in ground-based combat. It can use a variety of weapons and there is some discussion of giving it some degree of autonomy in battleground situations.[155][156][157]
Unmanned combat air vehicles (UCAVs), which are an upgraded form of UAVs, can do a wide variety of missions, including combat. UCAVs are being designed such as the BAE Systems Mantis which would have the ability to fly themselves, to pick their own course and target, and to make most decisions on their own.[158] The BAE Taranis is a UCAV built by Great Britain which can fly across continents without a pilot and has new means to avoid detection.[159] Flight trials are expected to begin in 2011.[160]
The AAAI has studied this topic in depth[107] and its president has commissioned a study to look at this issue.[161]
Some have suggested a need to build «Friendly AI», meaning that the advances which are already occurring with AI should also include an effort to make AI intrinsically friendly and humane.[162] Several such measures reportedly already exist, with robot-heavy countries such as Japan and South Korea[163] having begun to pass regulations requiring robots to be equipped with safety systems, and possibly sets of ‘laws’ akin to Asimov’s Three Laws of Robotics.[164][165] An official report was issued in 2009 by the Japanese government’s Robot Industry Policy Committee.[166] Chinese officials and researchers have issued a report suggesting a set of ethical rules, and a set of new legal guidelines referred to as «Robot Legal Studies.»[167] Some concern has been expressed over a possible occurrence of robots telling apparent falsehoods.[168]
Mining robots
Mining robots are designed to solve a number of problems currently facing the mining industry, including skills shortages, improving productivity from declining ore grades, and achieving environmental targets. Due to the hazardous nature of mining, in particular underground mining, the prevalence of autonomous, semi-autonomous, and tele-operated robots has greatly increased in recent times. A number of vehicle manufacturers provide autonomous trains, trucks and loaders that will load material, transport it on the mine site to its destination, and unload without requiring human intervention. One of the world’s largest mining corporations, Rio Tinto, has recently expanded its autonomous truck fleet to the world’s largest, consisting of 150 autonomous Komatsu trucks, operating in Western Australia.[169] Similarly, BHP has announced the expansion of its autonomous drill fleet to the world’s largest, 21 autonomous Atlas Copco drills.[170]
Drilling, longwall and rockbreaking machines are now also available as autonomous robots.[171] The Atlas Copco Rig Control System can autonomously execute a drilling plan on a drilling rig, moving the rig into position using GPS, set up the drill rig and drill down to specified depths.[172] Similarly, the Transmin Rocklogic system can automatically plan a path to position a rockbreaker at a selected destination.[173] These systems greatly enhance the safety and efficiency of mining operations.
Healthcare
Robots in healthcare have two main functions. Those which assist an individual, such as a sufferer of a disease like Multiple Sclerosis, and those which aid in the overall systems such as pharmacies and hospitals.
Home automation for the elderly and disabled
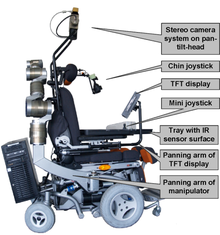
The Care-Providing Robot FRIEND
Robots used in home automation have developed over time from simple basic robotic assistants, such as the Handy 1,[174] through to semi-autonomous robots, such as FRIEND which can assist the elderly and disabled with common tasks.
The population is aging in many countries, especially Japan, meaning that there are increasing numbers of elderly people to care for, but relatively fewer young people to care for them.[175][176] Humans make the best carers, but where they are unavailable, robots are gradually being introduced.[177]
FRIEND is a semi-autonomous robot designed to support disabled and elderly people in their daily life activities, like preparing and serving a meal. FRIEND make it possible for patients who are paraplegic, have muscle diseases or serious paralysis (due to strokes etc.), to perform tasks without help from other people like therapists or nursing staff.
Pharmacies
Script Pro manufactures a robot designed to help pharmacies fill prescriptions that consist of oral solids or medications in pill form.[178][better source needed] The pharmacist or pharmacy technician enters the prescription information into its information system. The system, upon determining whether or not the drug is in the robot, will send the information to the robot for filling. The robot has 3 different size vials to fill determined by the size of the pill. The robot technician, user, or pharmacist determines the needed size of the vial based on the tablet when the robot is stocked. Once the vial is filled it is brought up to a conveyor belt that delivers it to a holder that spins the vial and attaches the patient label. Afterwards it is set on another conveyor that delivers the patient’s medication vial to a slot labeled with the patient’s name on an LED read out. The pharmacist or technician then checks the contents of the vial to ensure it’s the correct drug for the correct patient and then seals the vials and sends it out front to be picked up.
McKesson’s Robot RX is another healthcare robotics product that helps pharmacies dispense thousands of medications daily with little or no errors.[179] The robot can be ten feet wide and thirty feet long and can hold hundreds of different kinds of medications and thousands of doses. The pharmacy saves many resources like staff members that are otherwise unavailable in a resource scarce industry. It uses an electromechanical head coupled with a pneumatic system to capture each dose and deliver it to either its stocked or dispensed location. The head moves along a single axis while it rotates 180 degrees to pull the medications. During this process it uses barcode technology to verify it’s pulling the correct drug. It then delivers the drug to a patient specific bin on a conveyor belt. Once the bin is filled with all of the drugs that a particular patient needs and that the robot stocks, the bin is then released and returned out on the conveyor belt to a technician waiting to load it into a cart for delivery to the floor.
Research robots
While most robots today are installed in factories or homes, performing labour or life saving jobs, many new types of robot are being developed in laboratories around the world. Much of the research in robotics focuses not on specific industrial tasks, but on investigations into new types of robot, alternative ways to think about or design robots, and new ways to manufacture them. It is expected that these new types of robot will be able to solve real world problems when they are finally realized.[citation needed]
Bionic and biomimetic robots
One approach to designing robots is to base them on animals. BionicKangaroo was designed and engineered by studying and applying the physiology and methods of locomotion of a kangaroo.
Nanorobots
Nanorobotics is the emerging technology field of creating machines or robots whose components are at or close to the microscopic scale of a nanometer (10−9 meters). Also known as «nanobots» or «nanites», they would be constructed from molecular machines. So far, researchers have mostly produced only parts of these complex systems, such as bearings, sensors, and synthetic molecular motors, but functioning robots have also been made such as the entrants to the Nanobot Robocup contest.[180] Researchers also hope to be able to create entire robots as small as viruses or bacteria, which could perform tasks on a tiny scale. Possible applications include micro surgery (on the level of individual cells), utility fog,[181] manufacturing, weaponry and cleaning.[182] Some people have suggested that if there were nanobots which could reproduce, the earth would turn into «grey goo», while others argue that this hypothetical outcome is nonsense.[183][184]
Reconfigurable robots
A few researchers have investigated the possibility of creating robots which can alter their physical form to suit a particular task,[185] like the fictional T-1000. Real robots are nowhere near that sophisticated however, and mostly consist of a small number of cube shaped units, which can move relative to their neighbours. Algorithms have been designed in case any such robots become a reality.[186]
Robotic, mobile laboratory operators
In July 2020 scientists reported the development of a mobile robot chemist and demonstrate that it can assist in experimental searches. According to the scientists their strategy was automating the researcher rather than the instruments – freeing up time for the human researchers to think creatively – and could identify photocatalyst mixtures for hydrogen production from water that were six times more active than initial formulations. The modular robot can operate laboratory instruments, work nearly around the clock, and autonomously make decisions on his next actions depending on experimental results.[187][188]
Soft-bodied robots
Robots with silicone bodies and flexible actuators (air muscles, electroactive polymers, and ferrofluids) look and feel different from robots with rigid skeletons, and can have different behaviors.[189] Soft, flexible (and sometimes even squishy) robots are often designed to mimic the biomechanics of animals and other things found in nature, which is leading to new applications in medicine, care giving, search and rescue, food handling and manufacturing, and scientific exploration.[190][191]
Swarm robots
Inspired by colonies of insects such as ants and bees, researchers are modeling the behavior of swarms of thousands of tiny robots which together perform a useful task, such as finding something hidden, cleaning, or spying. Each robot is quite simple, but the emergent behavior of the swarm is more complex. The whole set of robots can be considered as one single distributed system, in the same way an ant colony can be considered a superorganism, exhibiting swarm intelligence. The largest swarms so far created include the iRobot swarm, the SRI/MobileRobots CentiBots project[192] and the Open-source Micro-robotic Project swarm, which are being used to research collective behaviors.[193][194] Swarms are also more resistant to failure. Whereas one large robot may fail and ruin a mission, a swarm can continue even if several robots fail. This could make them attractive for space exploration missions, where failure is normally extremely costly.[195]
Haptic interface robots
Robotics also has application in the design of virtual reality interfaces. Specialized robots are in widespread use in the haptic research community. These robots, called «haptic interfaces», allow touch-enabled user interaction with real and virtual environments. Robotic forces allow simulating the mechanical properties of «virtual» objects, which users can experience through their sense of touch.[196]
Contemporary art and sculpture
Robots are used by contemporary artists to create works that include mechanical automation. There are many branches of robotic art, one of which is robotic installation art, a type of installation art that is programmed to respond to viewer interactions, by means of computers, sensors and actuators. The future behavior of such installations can therefore be altered by input from either the artist or the participant, which differentiates these artworks from other types of kinetic art.
Le Grand Palais in Paris organized an exhibition «Artists & Robots», featuring artworks created by more than forty artists with the help of robots in 2018.[197]
Robots in popular culture

Literature
Robotic characters, androids (artificial men/women) or gynoids (artificial women), and cyborgs (also «bionic men/women», or humans with significant mechanical enhancements) have become a staple of science fiction.
The first reference in Western literature to mechanical servants appears in Homer’s Iliad. In Book XVIII, Hephaestus, god of fire, creates new armor for the hero Achilles, assisted by robots.[198] According to the Rieu translation, «Golden maidservants hastened to help their master. They looked like real women and could not only speak and use their limbs but were endowed with intelligence and trained in handwork by the immortal gods.» The words «robot» or «android» are not used to describe them, but they are nevertheless mechanical devices human in appearance. «The first use of the word Robot was in Karel Čapek’s play R.U.R. (Rossum’s Universal Robots) (written in 1920)». Writer Karel Čapek was born in Czechoslovakia (Czech Republic).
Possibly the most prolific author of the twentieth century was Isaac Asimov (1920–1992)[199] who published over five-hundred books.[200] Asimov is probably best remembered for his science-fiction stories and especially those about robots, where he placed robots and their interaction with society at the center of many of his works.[201][202] Asimov carefully considered the problem of the ideal set of instructions robots might be given to lower the risk to humans, and arrived at his Three Laws of Robotics: a robot may not injure a human being or, through inaction, allow a human being to come to harm; a robot must obey orders given it by human beings, except where such orders would conflict with the First Law; and a robot must protect its own existence as long as such protection does not conflict with the First or Second Law.[203] These were introduced in his 1942 short story «Runaround», although foreshadowed in a few earlier stories. Later, Asimov added the Zeroth Law: «A robot may not harm humanity, or, by inaction, allow humanity to come to harm»; the rest of the laws are modified sequentially to acknowledge this.
According to the Oxford English Dictionary, the first passage in Asimov’s short story «Liar!» (1941) that mentions the First Law is the earliest recorded use of the word robotics. Asimov was not initially aware of this; he assumed the word already existed by analogy with mechanics, hydraulics, and other similar terms denoting branches of applied knowledge.[204]
Robot Competitions
Robots are used in a number of competitive events. Robot combat competitions have been popularized by television shows such as Robot Wars and BattleBots, featuring mostly remotely controlled ‘robots’ that compete against each other directly using various weaponry, there are also amateur robot combat leagues active globally outside of the televised events. Micromouse events, in which autonomous robots compete to solve mazes or other obstacle courses are also held internationally.
Robot competitions are also often used within educational settings to introduce the concept of robotics to children such as the FIRST Robotics Competition in the US.
Films
Robots appear in many films. Most of the robots in cinema are fictional. Two of the most famous are R2-D2 and C-3PO from the Star Wars franchise.
Sex robots
The concept of humanoid sex robots has drawn public attention and elicited debate regarding their supposed benefits and potential effects on society. Opponents argue that the introduction of such devices would be socially harmful, and demeaning to women and children,[205] while proponents cite their potential therapeutical benefits, particularly in aiding people with dementia or depression.[206]
Problems depicted in popular culture
Italian movie The Mechanical Man (1921), the first film to have shown a battle between robots
Fears and concerns about robots have been repeatedly expressed in a wide range of books and films. A common theme is the development of a master race of conscious and highly intelligent robots, motivated to take over or destroy the human race. Frankenstein (1818), often called the first science fiction novel, has become synonymous with the theme of a robot or android advancing beyond its creator.
Other works with similar themes include The Mechanical Man, The Terminator, Runaway, RoboCop, the Replicators in Stargate, the Cylons in Battlestar Galactica, the Cybermen and Daleks in Doctor Who, The Matrix, Enthiran and I, Robot. Some fictional robots are programmed to kill and destroy; others gain superhuman intelligence and abilities by upgrading their own software and hardware. Examples of popular media where the robot becomes evil are 2001: A Space Odyssey, Red Planet and Enthiran.
The 2017 game Horizon Zero Dawn explores themes of robotics in warfare, robot ethics, and the AI control problem, as well as the positive or negative impact such technologies could have on the environment.
Another common theme is the reaction, sometimes called the «uncanny valley», of unease and even revulsion at the sight of robots that mimic humans too closely.[106]
More recently, fictional representations of artificially intelligent robots in films such as A.I. Artificial Intelligence and Ex Machina and the 2016 TV adaptation of Westworld have engaged audience sympathy for the robots themselves.
See also
Further reading
- Al-Arshani, Sarah (29 November 2021). «Researchers behind the world’s first living robot have found a way to make it reproduce — by shaping it like Pac-Man». Business Insider.
- See this humanoid robot artist sketch drawings from sight (CNN, Video, 2019)
- Margolius, Ivan. ‘The Robot of Prague’, Newsletter, The Friends of Czech Heritage no. 17, Autumn 2017, pp. 3 – 6. https://czechfriends.net/images/RobotsMargoliusJul2017.pdf
- Glaser, Horst Albert and Rossbach, Sabine: The Artificial Human, Frankfurt/M., Bern, New York 2011 «A Tragical History»
- Gutkind, L. (2006). Almost Human: Making Robots Think. New York: W. W. Norton & Company, Inc.
- Craig, J.J. (2005). Introduction to Robotics, Pearson Prentice Hall. Upper Saddle River, NJ.
- Tsai, L. W. (1999). Robot Analysis. Wiley. New York.
- Sotheby’s New York. The Tin Toy Robot Collection of Matt Wyse (1996)
- DeLanda, Manuel. War in the Age of Intelligent Machines. 1991. Swerve. New York.
- Needham, Joseph (1986). Science and Civilization in China: Volume 2. Taipei: Caves Books Ltd.
- Cheney, Margaret [1989:123] (1981). Tesla, Man Out of Time. Dorset Press. New York. ISBN 0-88029-419-1
- Čapek, Karel (1920). R.U.R., Aventinum, Prague.
- TechCast Article Series, Jason Rupinski and Richard Mix, «Public Attitudes to Androids: Robot Gender, Tasks, & Pricing»
References
- ^ «Four-legged Robot, ‘Cheetah,’ Sets New Speed Record». Reuters. 6 March 2012. Archived from the original on 22 October 2013. Retrieved 5 October 2013.
- ^ Definition of ‘robot’. Oxford English Dictionary. Retrieved 27 November 2016.
- ^ «Forecasts – Driverless car market watch». driverless-future.com. Archived from the original on 19 April 2017. Retrieved 18 April 2017.
- ^ a b «robotics». Oxford Dictionaries. Archived from the original on 18 May 2011. Retrieved 4 February 2011.
- ^ Margolius, Ivan (Autumn 2017). «The Robot of Prague» (PDF). The Friends of Czech Heritage (17): 3–6. Archived (PDF) from the original on 11 September 2017.
- ^ a b c Zunt, Dominik. «Who did actually invent the word «robot» and what does it mean?». The Karel Čapek website. Archived from the original on 4 February 2012. Retrieved 11 September 2007.
- ^ Kurfess, Thomas R. (1 January 2005). Robotics and Automation Handbook. Taylor & Francis. ISBN 9780849318047. Archived from the original on 4 December 2016. Retrieved 5 July 2016 – via Google Books.
- ^ Pearce, Jeremy (15 August 2011). «George C. Devol, Inventor of Robot Arm, Dies at 99». The New York Times. Archived from the original on 25 December 2016. Retrieved 7 February 2012.
In 1961, General Motors put the first Unimate arm on an assembly line at the company’s plant in Ewing Township, N.J., a suburb of Trenton. The device was used to lift and stack die-cast metal parts taken hot from their molds.
- ^ Akins, Crystal. «5 jobs being replaced by robots». Excelle. Monster. Archived from the original on 24 April 2013. Retrieved 15 April 2013.
- ^ a b Hoy, Greg (28 May 2014). «Robots could cost Australian economy 5 million jobs, experts warn, as companies look to cut costs». ABC News. Australian Broadcasting Corporation. Archived from the original on 29 May 2014. Retrieved 29 May 2014.
- ^ «Telecom glossary «bot»«. Alliance for Telecommunications Solutions. 28 February 2001. Archived from the original on 2 February 2007. Retrieved 5 September 2007.
- ^ Polk, Igor (16 November 2005). «RoboNexus 2005 robot exhibition virtual tour». Robonexus Exhibition 2005. Archived from the original on 12 August 2007. Retrieved 10 September 2007.
- ^ Harris, Tom (16 April 2002). «How Robots Work». How Stuff Works. Archived from the original on 26 August 2007. Retrieved 10 September 2007.
- ^ a b c Needham, Joseph (1991). Science and Civilisation in China: Volume 2, History of Scientific Thought. Cambridge University Press. ISBN 978-0-521-05800-1.
- ^ Currie, Adam (1999). «The History of Robotics». Archived from the original on 18 July 2006. Retrieved 10 September 2007.
- ^ Noct. Att. L. 10
- ^ a b Needham, Volume 2, 54.
- ^ Deborah Levine Gera (2003). Ancient Greek Ideas on Speech, Language, and Civilization. Oxford University Press. ISBN 978-0-19-925616-7. Archived from the original on 5 December 2016. Retrieved 25 September 2016.
- ^ a b c Rosheim, Mark E. (1994). Robot evolution: the development of anthrobotics. Wiley-IEEE. ISBN 0-471-02622-0.
- ^ ««Robots then and now». BBC. 22 July 2004. Archived from the original on 20 December 2010.
- ^ O’Connor, J.J. and E.F. Robertson. «Heron biography». The MacTutor History of Mathematics archive. Archived from the original on 24 June 2008. Retrieved 5 September 2008.
- ^ Strong, J.S. (2007). Relics of the Buddha. Princeton University Press. pp. 133–134, 143. ISBN 978-0-691-11764-5.
- ^ Fowler, Charles B. (October 1967). «The Museum of Music: A History of Mechanical Instruments». Music Educators Journal. 54 (2): 45–49. doi:10.2307/3391092. JSTOR 3391092. S2CID 190524140.
- ^ «Early Clocks». A Walk Through Time. NIST Physics Laboratory. 12 August 2009. Retrieved 13 October 2022.
- ^ a b «The programmable robot of ancient Greece». New Scientist: 32–35. 6 July 2007.
- ^ Varadpande, Manohar Laxman (1987). History of Indian Theatre, Volume 1. p. 68. ISBN 9788170172215.
- ^ Wujastyk, Dominik (2003). The Roots of Ayurveda: Selections from Sanskrit Medical Writings. p. 222. ISBN 9780140448245.
- ^ Needham, Joseph (1965). Science and Civilisation in China: Volume 4, Physics and Physical Technology Part 2, Mechanical Engineering. p. 164. ISBN 9780521058032.
- ^ a b «Al-Jazarī | Arab inventor». Encyclopædia Britannica. Retrieved 15 June 2019.
- ^ Howard R. Turner (1997). Science in Medieval Islam: An Illustrated Introduction. University of Texas Press. p. 81. ISBN 0-292-78149-0.
- ^ Hill, Donald (May 1991). «Mechanical Engineering in the Medieval Near East». Scientific American. pp. 64–69. (cf. Hill, Donald. «History of Sciences in the Islamic World». IX. Mechanical Engineering. Archived from the original on 25 December 2007.)
- ^ Ancient Discoveries Islamic Science Part1. Archived from the original on 11 December 2021. Retrieved 15 June 2019.
- ^ Moran, M. E. (December 2006). «The da Vinci robot». J. Endourol. 20 (12): 986–90. doi:10.1089/end.2006.20.986. PMID 17206888.
… the date of the design and possible construction of this robot was 1495 … Beginning in the 1950s, investigators at the University of California began to ponder the significance of some of da Vinci’s markings on what appeared to be technical drawings … It is now known that da Vinci’s robot would have had the outer appearance of a Germanic knight.
- ^ Truitt, E.R. (2015). Medieval Robots: Mechanism, Magic, Nature, and Art. The Middle Ages Series. University of Pennsylvania Press, Incorporated. p. 136. ISBN 978-0-8122-9140-7. Retrieved 21 January 2023.
- ^ «Leonardo da Vinci’s Robots». Leonardo3.net. Archived from the original on 24 September 2008. Retrieved 25 September 2008.
- ^ Law, Jane Marie (1997). Puppets of Nostalgia – The Life, Death and Rebirth of the Japanese Awaji Ningyo Tradition. Princeton University Press. ISBN 978-0-691-02894-1.
- ^ Wood, Gabby (16 February 2002). «Living Dolls: A Magical History Of The Quest For Mechanical Life». The Guardian. Archived from the original on 20 December 2016.
- ^ «The Boy Robot of 1774». 21 February 2018.
- ^ Edwyn Gray, Nineteenth-century torpedoes and their inventors, page 18
- ^ Gray, Edwyn (2004). Nineteenth-Century Torpedoes and Their Inventors. Naval Institute Press. ISBN 978-1-59114-341-3.
- ^ Seifer, Marc (24 October 2011). Life and Times of Nikola Tesla. p. 1893. ISBN 9780806535562. Archived from the original on 5 December 2016.
- ^ Miessner, Benjamin Franklin (1916). Radiodynamics: The Wireless Control of Torpedoes and Other Mechanisms. D. Van Nostrand Company. p. 83.
- ^ US 613809, Tesla, Nikola, «Method of and apparatus for controlling mechanism of moving vessels or vehicles», published 1898-11-08
- ^ «Tesla – Master of Lightning». PBS. Archived from the original on 28 September 2008. Retrieved 24 September 2008.
- ^ Sarkar 2006, page 97
- ^ H. R. Everett, Unmanned Systems of World Wars I and II, MIT Press — 2015, pages 91-95
- ^ «AH Reffell & Eric Robot (1928)». Archived from the original on 11 November 2013. Retrieved 11 November 2013.
- ^ «Meet Mr. Robot – Not Forgetting His Master». The Age. 20 September 1935. Archived from the original on 7 March 2017. Retrieved 7 March 2017.
- ^ «Robot Dreams : The Strange Tale Of A Man’s Quest To Rebuild His Mechanical Childhood Friend». The Cleveland Free Times. Archived from the original on 15 January 2010. Retrieved 25 September 2008.
- ^ Schaut, Scott (2006). Robots of Westinghouse: 1924-Today. Mansfield Memorial Museum. ISBN 978-0-9785844-1-2.
- ^ Holland, Owen. «The Grey Walter Online Archive». Archived from the original on 9 October 2008. Retrieved 25 September 2008.
- ^ Waurzyniak, Patrick (July 2006). «Masters of Manufacturing: Joseph F. Engelberger». Society of Manufacturing Engineers. 137 (1). Archived from the original on 9 November 2011. Retrieved 25 September 2008.
- ^ «Robot Hall of Fame – Unimate». Carnegie Mellon University. Archived from the original on 26 September 2011. Retrieved 28 August 2008.
- ^ «National Inventor’s Hall of Fame 2011 Inductee». Invent Now. Archived from the original on 4 November 2014. Retrieved 18 March 2011.
- ^ «Company History». Fuji Yusoki Kogyo Co. Archived from the original on 4 February 2013. Retrieved 12 September 2008.
- ^ «KUKA Industrial Robot FAMULUS». Archived from the original on 10 June 2013. Retrieved 10 January 2008.
- ^ «History of Industrial Robots» (PDF). Archived from the original (PDF) on 24 December 2012. Retrieved 27 October 2012.
- ^ «History of Industrial Robots». robots.com. Archived from the original on 8 July 2015. Retrieved 24 August 2015.
- ^ «About us». Archived from the original on 9 January 2014.
- ^ «RoboHon: Cute little Robot cum Smartphone | Codexify». Archived from the original on 7 October 2015. Retrieved 6 October 2015.
- ^ Tesfaye, Mehret (13 August 2009). «Robots to get their own operating system». Ethiopian Review. Archived from the original on 18 September 2019.
- ^ Myoken, Yumiko (January 2009). Research and Development for Next-generation Service Robots in Japan (United Kingdom Foreign Ministry report). Science and Innovation Section, British Embassy, Tokyo, Japan. Archived from the original on 23 July 2012.
- ^ Dahiya, Ravinder S.; Valle, Maurizio (30 July 2012). Robotic Tactile Sensing – Technologies and System. Springer.com. doi:10.1007/978-94-007-0579-1. ISBN 9789400705784. Archived from the original on 29 December 2013. Retrieved 8 February 2014.
- ^ Dahiya, Ravinder S.; Metta, Giorgio; Cannata, Giorgio; Valle, Maurizio (2011). «Guest Editorial Special Issue on Robotic Sense of Touch». IEEE Transactions on Robotics. 27 (3): 385–388. doi:10.1109/TRO.2011.2155830. S2CID 18608163.
- ^ «Robotics in practice: Future capabilities»
by Joseph F. Engelberger.
in «Electronic Servicing & Technology» magazine 1982 August. - ^ McKeough, Tim (1 December 2008). «The Caterpillar Self-Driving Dump Truck». Fast Company. Archived from the original on 7 June 2011.
- ^ Weiss, Richard (9 December 2014). «Self-Driving Trucks to Revolutionize Logistics, DHL Says». Bloomberg News. Archived from the original on 22 July 2016.
- ^ Grayson, Wayne (16 October 2014). VIDEO: Why Caterpillar’s autonomous mining tech is «completely different from anything» it’s ever done. Archived from the original on 13 May 2016.
- ^ Takahashi, Kaori (23 April 2015). «Self-driving dump trucks, automatic shovels coming to Australian mines». Archived from the original on 9 May 2016.
- ^ Hall, Matthew (20 October 2014). «Forget self-driving Google cars, Australia has self-driving trucks». The Age. Archived from the original on 26 April 2016.
- ^ Clark, Charles (19 October 2015). «Australian mining giant Rio Tinto is using these huge self-driving trucks to transport iron ore». Business Insider. Archived from the original on 9 May 2016.
- ^ Berman, Dennis K. (23 July 2013). «Daddy, What Was a Truck Driver? Over the Next Two Decades, the Machines Themselves Will Take Over the Driving». The Wall Street Journal. Archived from the original on 4 March 2017.
- ^ «Robot can read, learn like a human». NBC News. 6 December 2010. Retrieved 10 December 2010.
- ^ Melik, James (3 January 2013). «Robots: Brave New World moves a step closer». Business Daily. BBC World Service. Archived from the original on 14 January 2019.
- ^ «Kitchen robot in Riga cooks up new future for fast food». techxplore.com. Retrieved 14 August 2021.
- ^ «Tech May Widen the Gap Between Rich and Poor». Futurism. Retrieved 23 August 2021.
- ^ «Indo-European root *orbh-«. 12 May 2008. Archived from the original on 24 January 2009. Retrieved 8 February 2014.
- ^ «Online Etymology Dictionary». Archived from the original on 14 December 2013. Retrieved 10 June 2012.
- ^ «Hank Green’s First Novel Is An Absolutely Remarkable Thing». Indianapolis Monthly. 1 October 2018. Retrieved 20 November 2019.
- ^ «You Are Pronouncing the Word «Robot» Wrong». Daily Kos. Retrieved 20 November 2019.
- ^ Ranger, Steve (20 December 2013). «Robots of death, robots of love: The reality of android soldiers and why laws for robots are doomed to failure». TechRepublic. Archived from the original on 27 January 2017. Retrieved 21 January 2017.
- ^ Moubarak, Paul M.; Ben-Tzvi, Pinhas (2011). «Adaptive manipulation of a Hybrid Mechanism Mobile Robot». 2011 IEEE International Symposium on Robotic and Sensors Environments (ROSE). pp. 113–118. doi:10.1109/ROSE.2011.6058520. ISBN 978-1-4577-0819-0. S2CID 8659998.
- ^ a b «Smart Caddy». Seegrid. Archived from the original on 11 October 2007. Retrieved 13 September 2007.
- ^ Zhang, Gexiang; Pérez-Jiménez, Mario J.; Gheorghe, Marian (5 April 2017). Real-life Applications with Membrane Computing. Springer. ISBN 9783319559896.
- ^ Kagan, E.; Shvalb, N.; Gal, I. (2019). Autonomous Mobile Robots and Multi‐Robot Systems: Motion‐Planning, Communication, and Swarming. John Wiley and Sons. ISBN 9781119212867.PP 65-69.
- ^ Patic, Deepack; Ansari, Munsaf; Tendulkar, Dilisha; Bhatlekar, Ritesh; Naik, Vijaykumar; Shailendra, Pawar (2020). «A Survey On Autonomous Military Service Robot». 2020 International Conference on Emerging Trends in Information Technology and Engineering (Ic-ETITE). IEEE International Conference on Emerging Trends in Information Technology and Engineering. pp. 1–7. doi:10.1109/ic-ETITE47903.2020.78. ISBN 978-1-7281-4142-8. S2CID 216588335.
- ^ «Definition of a robot» (PDF). Dansk Robot Forening. Archived from the original (PDF) on 28 June 2007. Retrieved 10 September 2007.
- ^ «Robotics-related Standards Sites». European Robotics Research Network. Archived from the original on 17 June 2006. Retrieved 15 July 2008.
- ^ «Service Robots». International Federation of Robotics. 27 October 2012. Archived from the original on 18 February 2010.
- ^ Mitgang, Lee (25 October 1983). «‘Nova’s’ ‘Talking Turtle’ Pofiles High Priest of School Computer Movement». Gainesville Sun.
- ^ Barnard, Jeff (January 29, 1985). «Robots In School: Games Or Learning?». Observer-Reporter. Washington. Archived from the original on September 22, 2015. Retrieved March 7, 2012.
- ^ «Education: Marvel of the Bronx». Time. April 1974. Archived from the original on 24 May 2019. Retrieved 19 May 2019.
- ^ «Leachim Archives». cyberneticzoo.com. 13 September 2010. Archived from the original on 28 May 2019. Retrieved 29 May 2019.
- ^ P. Moubarak, et al., Modular and Reconfigurable Mobile Robotics, Journal of Robotics and Autonomous Systems, 60 (12) (2012) 1648–1663.
- ^ Rédaction (25 December 2011). «Le consortium franco-québécois Mix dévoile son projet de voiture volante» (in French). aerobuzz.fr. Archived from the original on 6 October 2012. Retrieved 7 September 2012.
- ^ Scanlan, Steve, Robotics Design Inc., Montreal. «Modularity in robotics provides automation for all». Digital.ept.ca. Archived from the original on 5 July 2012. Retrieved 7 September 2012.
- ^ Plumbing and HVAC, Magazine (April 2010). «Duct cleaning robots» (PDF). roboticsdesign.qc.ca. plumbingandhvac.ca. Archived (PDF) from the original on 25 April 2013. Retrieved 29 April 2010.
- ^ «Universal Robots collaborate outside enclosures | Control Engineering». Controleng.com. February 2013. Archived from the original on 18 May 2013. Retrieved 4 June 2013.
- ^ Pittman, Kagan (19 May 2016). «INFOGRAPHIC: A Brief History of Collaborative Robots». Engineering.com. Archived from the original on 10 June 2016.
- ^ Hagerty, James (18 September 2012). «Baxter Robot Heads to Work’«. The Wall Street Journal. New York. Archived from the original on 10 April 2015. Retrieved 29 May 2014.
- ^ Markoff, John (18 September 2012). «A Robot With a Reassuring Touch». The New York Times. Archived from the original on 19 September 2012. Retrieved 18 September 2012.
- ^ «A Ping-Pong-Playing Terminator». Popular Science. Archived from the original on 29 March 2011. Retrieved 18 December 2010.
- ^ «Best robot 2009». Neterion. Tech Magazine.
- ^ «Robots Today and Tomorrow: IFR Presents the 2007 World Robotics Statistics Survey». RobotWorx. 29 October 2007. Archived from the original on 5 February 2008. Retrieved 14 December 2007.
- ^ «Japan’s robots slug it out to be world champ». Reuters. 2 December 2007. Archived from the original on 13 December 2007. Retrieved 1 January 2007.
- ^ a b Ho, C. C.; MacDorman, K. F.; Pramono, Z. A. D. (2008). «Human emotion and the uncanny valley: A GLM, MDS, and ISOMAP analysis of robot video ratings» (PDF). 2008 3rd ACM/IEEE International Conference on Human-Robot Interaction (HRI). Archived (PDF) from the original on 11 September 2008. Retrieved 24 September 2008.
- ^ a b «AI Topics / Ethics». Association for the Advancement of Artificial Intelligence. Archived from the original on 5 August 2011.
- ^ «Robots can be racist and sexist, new study warns». TRT World. Retrieved 27 June 2022.
- ^ «News Index by Topic — ETHICAL & SOCIAL IMPLICATIONS Archive». Association for the Advancement of Artificial Intelligence. Archived from the original on 6 April 2012.
- ^ McNealy, Kristie (29 July 2009). «Scientists Predict Artificial Brain in 10 Years». Archived from the original on 29 November 2009.
- ^ Moravec, Hans (1999). Robot: Mere Machine to Transcendent Mind. ISBN 978-0-19-513630-2. Archived from the original on 5 December 2016.
- ^ Weigand, Matthew (17 August 2009). «Robots Almost Conquering Walking, Reading, Dancing». Korea IT times. Archived from the original on 21 July 2011.
- ^ Schanze, Jens. «Plug & Pray». Archived from the original on 12 February 2016.
- ^ a b Markoff, John (26 July 2009). «Scientists Worry Machines May Outsmart Man». The New York Times. Archived from the original on 1 July 2017.
- ^ Vinge, Vernor (1993). «The Coming Technological Singularity: How to Survive in the Post-Human Era». Archived from the original on 1 January 2007.
- ^ Singer, P. W. (21 May 2009). «Gaming the Robot Revolution: A military technology expert weighs in on Terminator: Salvation». Slate. Archived from the original on 27 January 2010.
- ^ «Robot takeover». gyre.org. Archived from the original on 19 April 2012.
- ^ «Robotapocalypse». Engadget. Archived from the original on 4 May 2018.
- ^ Palmer, Jason (3 August 2009). «Call for debate on killer robots». BBC News. Archived from the original on 7 August 2009.
- ^ Axe, David (13 August 2009). «Robot three-way portends autonomous future». Wired. Archived from the original on 7 November 2012.
- ^ Mick, Jason (17 February 2009). «New Navy-funded Report Warns of War Robots Going «Terminator»«. DailyTech. Archived from the original on 28 July 2009.
- ^ Flatley, Joseph L. (18 February 2009). «Navy report warns of robot uprising, suggests a strong moral compass». Engadget. Archived from the original on 4 June 2011.
- ^ Lamb, Gregory M. (17 February 2010). «New role for robot warriors». The Christian Science Monitor. Archived from the original on 24 September 2015.
- ^ «Biomass-Eating Military Robot Is a Vegetarian, Company Says». Fox News. 16 July 2009. Archived from the original on 3 August 2009. Retrieved 31 July 2009.
- ^ Shachtman, Noah (17 July 2009). «Danger Room What’s Next in National Security Company Denies its Robots Feed on the Dead». Wired. Archived from the original on 29 July 2009. Retrieved 31 July 2009.
- ^ «Cyclone Power Technologies Responds to Rumors about «Flesh Eating» Military Robot» (PDF) (Press release). RTI Inc. 16 July 2009. pp. 1–2. Archived (PDF) from the original on 23 August 2009.
- ^ «Brief Project Overview, EATR: Energetically Autonomous Tactical Robot» (PDF). RTI Inc. 6 April 2009. p. 22.
- ^ Manuel de Landa, War in the Age of Intelligent Machines, New York: Zone Books, 1991, 280 pages, Hardcover, ISBN 0-942299-76-0; Paperback, ISBN 0-942299-75-2.
- ^ McGaughey, E (2022) [January 10, 2018]. «Will Robots Automate Your Job Away? Full Employment, Basic Income, and Economic Democracy». Industrial Law Journal. 51 (3). doi:10.2139/ssrn.3119589. SSRN 3119589.
- ^ Porter, Eduardo; Manjoo, Farhad (9 March 2016). «A Future Without Jobs? Two Views of the Changing Work Force». The New York Times. Archived from the original on 15 February 2017. Retrieved 23 February 2017.
- ^ Thompson, Derek (July–August 2015). «A World Without Work». The Atlantic. Archived from the original on 27 February 2017. Retrieved 11 March 2017.
- ^ Yan (30 July 2011). «Foxconn to replace workers with 1 million robots in 3 years». Xinhua News Agency. Archived from the original on 8 October 2011. Retrieved 4 August 2011.
- ^ «Judgment day – employment law and robots in the workplace». futureofworkhub. Archived from the original on 3 April 2015. Retrieved 7 January 2015.
- ^ Delaney, Kevin (17 February 2017). «The robot that takes your job should pay taxes, says Bill Gates». Quartz. Archived from the original on 5 March 2017. Retrieved 4 March 2017.
- ^ «The Changing Nature of Work». Archived from the original on 30 September 2018. Retrieved 8 October 2018.
- ^ Talbot, Ben; Dayoub, Feras; Corke, Peter; Wyeth, Gordon (December 2021). «Robot Navigation in Unseen Spaces Using an Abstract Map». IEEE Transactions on Cognitive and Developmental Systems. 13 (4): 791–805. arXiv:2001.11684. doi:10.1109/TCDS.2020.2993855. ISSN 2379-8939. S2CID 211004032.
- ^ «Contact Systems Pick and Place robots». Contact Systems. Archived from the original on 14 September 2008. Retrieved 21 September 2008.
- ^ «SMT pick-and-place equipment». Assembleon. Archived from the original on 3 August 2008. Retrieved 21 September 2008.
- ^ «The Basics of Automated Guided Vehicles». Savant Automation, AGV Systems. Archived from the original on 8 October 2007. Retrieved 13 September 2007.
- ^ «Jervis B. Webb». Webb SmartLoader. Archived from the original on 23 May 2013. Retrieved 2 September 2011.
- ^ «SpeciMinder». CSS Robotics. Archived from the original on 1 July 2009. Retrieved 25 September 2008.
- ^ «ADAM robot». RMT Robotics. Archived from the original on 17 May 2006. Retrieved 25 September 2008.
- ^ «Can Do». Aethon. Archived from the original on 3 August 2008. Retrieved 25 September 2008.
- ^ «Eskorta robot». Fennec Fox Technologies. Archived from the original on 6 December 2011. Retrieved 25 November 2011.
- ^ «Delivery Robots & AGVs». Mobile Robots. Archived from the original on 26 February 2010. Retrieved 25 September 2008.
- ^ «Dante II, list of published papers». The Robotics Institute of Carnegie Mellon University. Archived from the original on 15 May 2008. Retrieved 16 September 2007.
- ^ «Mars Pathfinder Mission: Rover Sojourner». NASA. 8 July 1997. Archived from the original on 1 February 2017. Retrieved 19 September 2007.
- ^ a b «Robot assisted surgery: da Vinci Surgical System». Brown University Division of Biology and Medicine. Archived from the original on 16 September 2007. Retrieved 19 September 2007.
- ^ «The Utilization of Robotic Space Probes in Deep Space Missions:Case Study of AI Protocols and Nuclear Power Requirements». Proceedings of 2011 International Conference on Mechanical Engineering, Robotics and Aerospace. October 2011.
- ^ Foust, Jeff (16 January 2012). «Review: Space Probes». Archived from the original on 31 August 2012. Review of Space Probes: 50 Years of Exploration from Luna 1 to New Horizons, by Philippe Séguéla Firefly, 2011.
- ^ «Celebrities set to reach for Atwood’s LongPen». Canadian Broadcasting Corporation. 15 August 2007. Archived from the original on 22 May 2009. Retrieved 21 September 2008.
- ^ Graham, Stephen (12 June 2006). «America’s robot army». New Statesman. Archived from the original on 17 February 2012. Retrieved 24 September 2007.
- ^ «Battlefield Robots: to Iraq, and Beyond». Defense Industry Daily. 20 June 2005. Archived from the original on 26 August 2007. Retrieved 24 September 2007.
- ^ Shachtman, Noah (November 2005). «The Baghdad Bomb Squad». Wired. Archived from the original on 22 April 2008. Retrieved 14 September 2007.
- ^ Shachtman, Noah (28 March 2013). «WIRED: First Armed Robots on Patrol in Iraq». Wired. Archived from the original on 3 April 2009. Retrieved 8 February 2014.
- ^ Shachtman, Noah (28 March 2013). «WIRED: Armed Robots Pushed To Police». Wired. Archived from the original on 12 April 2009. Retrieved 8 February 2014.
- ^ «America’s Robot Army». Popularmechanics.com. 18 December 2009. Archived from the original on 5 February 2010. Retrieved 8 February 2014.
- ^ Hagerman, Eric (23 February 2010). «The Present and Future of Unmanned Drone Aircraft: An Illustrated Field Guide». Popular Science. Archived from the original on 26 February 2010.
- ^ Higgins, Kat (12 July 2010). «Taranis: The £143m Fighter Jet Of The Future». Sky News Online. Archived from the original on 15 July 2010. Retrieved 13 July 2010.
- ^ Emery, Daniel (12 July 2010). «MoD lifts lid on unmanned combat plane prototype». BBC News. Archived from the original on 12 July 2010. Retrieved 12 July 2010.
- ^ AAAI Presidential Panel on Long-Term AI Futures 2008–2009 Study (Report). Association for the Advancement of Artificial Intelligence. Archived from the original on 28 August 2009. Retrieved 26 July 2009.
- ^ «Why We Need Friendly AI». 3 Laws Unsafe. July 2004. Archived from the original on 24 May 2012. Retrieved 27 July 2009.
- ^ «Robotic age poses ethical dilemma». BBC News. 7 March 2007. Archived from the original on 15 February 2009. Retrieved 2 January 2007.
- ^ Christensen, Bill (26 May 2006). «Asimov’s First Law: Japan Sets Rules for Robots». Live Science. Archived from the original on 13 October 2008.
- ^ «Japan drafts rules for advanced robots». UPI. 6 April 2007. Archived from the original on 11 October 2008 – via physorg.com.
- ^ «Building a Safe and Secure Social System Incorporating the Coexistence of Humans and Robots» (Press release). Ministry of Economy, Trade and Industry. March 2009. Archived from the original on 27 September 2011.
- ^ Weng, Yueh-Hsuan; Chen, Chien-Hsun; Sun, Chuen-Tsai (25 April 2009). «Toward the Human–Robot Co-Existence Society: On Safety Intelligence for Next Generation Robots». International Journal of Social Robotics. 1 (4): 267–282. doi:10.1007/s12369-009-0019-1. S2CID 36232530.
- ^ Fox, Stuart (19 August 2009). «Evolving Robots Learn To Lie To Each Other». Popular Science.
- ^ «Rio Tinto Media Center – Rio Tinto boosts driverless truck fleet to 150 under Mine of the Future™ programme». Riotinto.com. Archived from the original on 24 April 2013. Retrieved 8 February 2014.
- ^ «BHP Billiton hits go on autonomous drills». Retrieved 13 February 2023.
- ^ Adrian (6 September 2011). «AIMEX blog – Autonomous mining equipment». Adrianboeing.blogspot.com. Archived from the original on 18 December 2013. Retrieved 8 February 2014.
- ^ «Atlas Copco – RCS». Atlascopco.com. Archived from the original on 7 February 2014. Retrieved 8 February 2014.
- ^ «Transmin – Rocklogic». Rocklogic.com.au. Archived from the original on 25 January 2014. Retrieved 8 February 2014.
- ^ Topping, Mike; Smith, Jane (1999). «An Overview Of Handy 1, A Rehabilitation Robot For The Severely Disabled». CSUN Center on Disabilities Conference Proceedings. 1999. Proceedings: Session 59. Archived from the original on 5 August 2009. Retrieved 14 August 2010.
The early version of the Handy 1 system consisted of a Cyber 310 robotic arm with five degrees of freedom plus a gripper.
- ^ Jeavans, Christine (29 November 2004). «Welcome to the ageing future». BBC News. Archived from the original on 16 October 2007. Retrieved 26 September 2007.
- ^ «Statistical Handbook of Japan: Chapter 2 Population». Statistics Bureau & Statistical Research and Training Institute. Archived from the original on 6 September 2013. Retrieved 26 September 2007.
- ^ «Robotic future of patient care». E-Health Insider. 16 August 2007. Archived from the original on 21 November 2007. Retrieved 26 September 2007.
- ^ Gebhart, Fred (4 July 2019). «The Future of Pharmacy Automation». Drug Topics Journal. Drug Topics July 2019. 163 (7). Retrieved 16 October 2022.
- ^ Dolan, Kerry A. «R2D2 Has Your Pills». Forbes. Retrieved 20 November 2019.
- ^ «Nanobots Play Football». Techbirbal. Archived from the original on 3 April 2013. Retrieved 8 February 2014.
- ^ «KurzweilAI.net». 21 June 2010. Archived from the original on 21 June 2010. Retrieved 5 July 2016.
- ^ «(Eric Drexler 1986) Engines of Creation, The Coming Era of Nanotechnology». E-drexler.com. Archived from the original on 6 September 2014. Retrieved 8 February 2014.
- ^ Phoenix, Chris (December 2003). «Of Chemistry, Nanobots, and Policy». Center for Responsible Nanotechnology. Archived from the original on 11 October 2007. Retrieved 28 October 2007.
- ^ «Nanotechnology pioneer slays ‘grey goo’ myths». Institute of Physics Electronics Journals. 7 June 2004. Retrieved 28 October 2007. [permanent dead link]
- ^ Toth-Fejel, Tihamer (May 1996). LEGO(TM)s to the Stars: Active MesoStructures, Kinetic Cellular Automata, and Parallel Nanomachines for Space Applications. 1996 International Space Development Conference. New York City. Archived from the original on 27 September 2007.
- ^ Fitch, Robert; Butler, Zack; Rus, Daniela. «Reconfiguration Planning for Heterogeneous Self-Reconfiguring Robots» (PDF). Archived (PDF) from the original on 19 June 2007.
- ^ «Researchers build robot scientist that has already discovered a new catalyst». phys.org. Retrieved 16 August 2020.
- ^ Burger, Benjamin; Maffettone, Phillip M.; Gusev, Vladimir V.; Aitchison, Catherine M.; Bai, Yang; Wang, Xiaoyan; Li, Xiaobo; Alston, Ben M.; Li, Buyi; Clowes, Rob; Rankin, Nicola; Harris, Brandon; Sprick, Reiner Sebastian; Cooper, Andrew I. (July 2020). «A mobile robotic chemist». Nature. 583 (7815): 237–241. Bibcode:2020Natur.583..237B. doi:10.1038/s41586-020-2442-2. ISSN 1476-4687. PMID 32641813. S2CID 220420261. Retrieved 16 August 2020.
- ^ Schwartz, John (27 March 2007). «In the Lab: Robots That Slink and Squirm». The New York Times. Archived from the original on 3 April 2015. Retrieved 22 September 2008.
- ^ Eschner, Kat (25 March 2019). «Squishy robots now have squishy computers to control them». Popular Science.
- ^ «The softer side of robotics». May 2019. Retrieved 13 February 2023.
- ^ «SRI/MobileRobots». activrobots.com. Archived from the original on 12 February 2009.
- ^ «Open-source micro-robotic project». Archived from the original on 11 November 2007. Retrieved 28 October 2007.
- ^ «Swarm». iRobot Corporation. Archived from the original on 27 September 2007. Retrieved 28 October 2007.
- ^ Knapp, Louise (21 December 2000). «Look, Up in the Sky: Robofly». Wired. Archived from the original on 26 June 2012. Retrieved 25 September 2008.
- ^ «The Cutting Edge of Haptics». MIT Technology review. Retrieved 25 September 2008.
- ^ «Artists & Robots Exposition au Grand Palais du 5 avril au 9 juillet 2018». 14 August 2019. Archived from the original on 14 August 2019. Retrieved 3 February 2020.
- ^ «Comic Potential : Q&A with Director Stephen Cole». Cornell University. Archived from the original on 3 January 2009. Retrieved 21 November 2007.
- ^ Freedman, Carl, ed. (2005). Conversations with Isaac Asimov (1. ed.). Jackson: Univ. Press of Mississippi. p. vii. ISBN 978-1-57806-738-1. Retrieved 4 August 2011.
… quite possibly the most prolific
- ^ Oakes, Elizabeth H. (2004). American writers. New York: Facts on File. p. 24. ISBN 978-0-8160-5158-8. Retrieved 4 August 2011.
most prolific authors asimov.
- ^ He wrote «over 460 books as well as thousands of articles and reviews», and was the «third most prolific writer of all time [and] one of the founding fathers of modern science fiction». White, Michael (2005). Isaac Asimov: a life of the grand master of science fiction. Carroll & Graf. pp. 1–2. ISBN 978-0-7867-1518-3. Archived from the original on 5 December 2016. Retrieved 25 September 2016.
- ^ R. Clarke. «Asimov’s Laws of Robotics – Implications for Information Technology». Australian National University/IEEE. Archived from the original on 22 July 2008. Retrieved 25 September 2008.
- ^ Seiler, Edward; Jenkins, John H. (27 June 2008). «Isaac Asimov FAQ». Isaac Asimov Home Page. Archived from the original on 16 July 2012. Retrieved 24 September 2008.
- ^ White, Michael (2005). Isaac Asimov: A Life of the Grand Master of Science Fiction. Carroll & Graf. p. 56. ISBN 978-0-7867-1518-3.
- ^ «Intelligent machines: Call for a ban on robots designed as sex toys». BBC News. 15 September 2015. Archived from the original on 30 June 2018. Retrieved 21 June 2018.
- ^ Abdollahi, Hojjat; Mollahosseini, Ali; Lane, Josh T.; Mahoor, Mohammad H. (November 2017). A pilot study on using an intelligent life-like robot as a companion for elderly individuals with dementia and depression. 2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids). pp. 541–546. arXiv:1712.02881. Bibcode:2017arXiv171202881A. doi:10.1109/humanoids.2017.8246925. ISBN 978-1-5386-4678-6. S2CID 1962455.
External links
![]()
Wikiquote has quotations related to Robot.
- Robotics at Curlie
- Journal of Field Robotics