
МОУ «Сернурская средняя (полная) общеобразовательнаяшкола №2
имени Н.А. Заболоцкого
Элективный
курс по выбору для предпрофильной подготовки
«Моделирование
физических процессов
в
электронных таблицах MS Excel»
Онучина Вера
Ивановна пос Сернур Республика Марий Эл ovi17@rambler.ru 88363398516
СОДЕРЖАНИЕ
Стр.
ВВЕДЕНИЕ 3
ЭЛЕКТИВНЫЙ КУРС ДЛЯ ПРЕДПРОФИЛЬНОЙ ПОДГОТОВКИ «Моделирование физических
процессов в электронных таблицах» 5
1.2 Программа
курса 5
1.3. Содержание
занятий 9
ЗАКЛЮЧЕНИЕ 26
СПИСОК ЛИТЕРАТУРЫ 27
ПРИЛОЖЕНИЕ 1 28
ВВЕДЕНИЕ
ФИЗИКА — наука, в
которой математическое моделирование является важным методом исследования.
Сегодня кроме теоретической и экспериментальной физики можно выделить третий раздел
— вычислительную физику. Одним из наиболее перспективных направлений
использования информационных технологий в физическом образовании является
компьютерное моделирование физических процессов и явлений. Рост компьютеризации
школ дает возможность каждому учителю использовать на своих уроках
информационные технологии, что с одной стороны, активизирует внимание учащихся
и усиливает их интерес к уроку, а с другой – облегчает работу учащихся и
учителя. Компьютерные модели легко вписываются в традиционный урок, позволяя
учителю продемонстрировать на экране компьютера многие физические эффекты, а
также позволяют организовать новые нетрадиционные виды учебной деятельности.
При грамотном использовании компьютерных моделей физических явлений можно
достигнуть многого из того, что требуется для неформального усвоения курса
физики и для формирования физической картины мира. Значительное число
компьютерных моделей, охватывающих почти весь школьный курс физики, содержится
в учебных электронных изданиях: “Физика в картинках”, “Открытая физика”, “Живая
физика”, «1 С Репетитор», «1 С Физика 7-11», «Физика 7-11 практикум», «Уроки
физики 7- 8 классы», «Кирилл и Мефодий 5-6» и другие.
Существуют
большие возможности моделирования физических задач в среде MS Excel.
Электронные таблицы, первоначально использовавшиеся для финансовых расчетов, все
шире применяются для сложных многошаговых технических расчетах. Так, применение
электронных таблиц на уроках физики может сократить время при проведении
однотипных расчетов, например при выполнении лабораторных работ, где требуется
рассчитывать одни и те же физические величины для нескольких опытов.
Использование электронных таблиц Excel обусловлено следующими причинами:
а) функциональные возможности программы Excel заведомо перекрывают все
потребности по автоматизации обработки данных эксперимента, построению и
исследованию моделей; б) универсальная программа Excel обладает стандартным
интерфейсом; в) изучение Excel предусматривается программами общего образования
по информатике, следовательно, возможно эффективное использование Excel в
условиях осуществления межпредметных связей с информатикой и другими учебными
дисциплинами, например, с математикой; г) данная программа отличается
доступностью в изучении и простотой в управлении, что принципиально важно как
для ученика, так и для учителя; д) результаты деятельности на рабочем листе
Excel (тексты, таблицы, графики, формулы) «открыты» пользователю. Cреди всех известных программных
средств Excel обладает едва ли не самым богатым инструментарием для работы с
графиками. Программа позволяет с использованием приемов автозаполнения
представлять данные в табличной форме, оперативно их преобразовывать с использованием
огромной библиотеки функций, строить графики редактировать их практически по
всем элементам, увеличивать изображение какого-либо фрагмента графика, выбирать
функциональные масштабы по осям, экстраполировать графики и т.д
Электронные
таблицы наиболее эффективно могут использоваться при проведении:
—
Демонстрационного
эксперимента;
—
Лабораторных
работ;
—
Физического
практикума;
—
Решения
задач по различным темам курса физики;
—
Контроля
знаний.
В своей
работе как учитель физики и информатики на протяжении ряда лет я использую
возможности компьютерного класса школы в преподавании физики. При прохождении
темы информатики «Табличные вычисления на компьютере» в части «Математическое
моделирование и решение задач с помощью электронных таблиц» я использую задачи
по кинематике и динамике, что способствует повторению, углублению и закреплению
материала этих тем по физике, а также демонстрация практического применения
электронных таблиц при изучении других предметов школьного курса ( в дальнейшем
при изучении темы информатики «Программирование на Паскале» я повторяю эти
физические задачи, но демонстрация в электронных таблицах наглядней). Данный
курс «Моделирование физических процессов в электронных таблицах» является
обобщением опыта работы в этой области на протяжении ряда лет.
I. ЭЛЕКТИВНЫЙ КУРС ДЛЯ
ПРЕДПРОФИЛЬНОЙ ПОДГОТОВКИ «МОДЕЛИРОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ В ЭЛЕКТРОННЫХ
ТАБЛИЦАХ MS EXCEL». 9 класс.
1.1.
Программа
курса
Пояснительная
записка.
В настоящее время
многие ученики основной школы имеют дома компьютеры. Однако большинство из них
используют компьютер для всевозможных игр, просмотра видеороликов и музыки.
Меньшее время уделяется для учебных задач, которые сводятся в основном к набору
текстов, работе в графических редакторах. Первоначально компьютеры
разрабатывались как ЭВМ, и в современных компьютерах этот потенциал вычислений
только усиливается, что явно не используется хотя бы в домашних условиях.
Программная среда Ms Excel позволяет продемонстрировать возможности компьютера
в вычислительном эксперименте. Электронные таблицы, первоначально
использовавшиеся для финансовых расчетов, все шире применяются для сложных
многошаговых технических расчетов, что необходимо показать ученикам школы. Курс
«Моделирование физических процессов в программной среде Ms Excel» рассчитан на
использование электронных таблиц для построения моделей физических процессов,
начиная с простейших — «Моделирование равномерного прямолинейного движения,
равноускоренного движения» — до более сложных , как, например, «Моделирование
движения тел с учетом многих сил действующих на тело». Кроме того,
предусматривается проведение лабораторных работ с оформлением результата с
использованием электронных таблиц.
Данный курс является межпредметным,
расширяющим и углубляющим базовый курс физики и информатики. Он дает
возможность познакомить учащихся с задачами повышенного уровня сложности,
нестандартными задачами, и, таким образом, способствовать осознанному выбору
профиля, связанного с физикой и информатикой.
Программа курса предполагает владение
учащимися базовым уровнем знаний, умений и навыков по информатике за курс 8
класса (электронные таблицы уже изучены ). Программа курса включает в себя
углубление и расширение знаний и умений, связанных с развитием навыков
алгоритмического мышления при построении моделей в Ms Excel, использованию
самих электронных таблиц и построение моделей физических процессов по физике.
Задачи, предлагаемые в данном курсе,
решаются с использованием графического интерфейса электронных таблиц, что
позволяет повысить учебную мотивацию учащихся и проверить свои способности к
физике и информатике. Вместе с тем, содержание курса позволяет ученику любого
уровня активно включиться в учебно-познавательный процесс и максимально
проявить себя.
Цели курса :
— закрепить интерес учащихся к
изучению физики и информатики,
— расширить знания о способах решения
задач, построении графиков с использованием электронных таблиц,
— развивать умения самостоятельно
работать с различными источниками информации, решать творческие задачи,
— создать ориентационную и
мотивационную основу для осознанного выбора профиля обучения.
Задачи курса :
Предлагаемый курс должен обеспечить
реализацию следующих задач :
— углубить и расширить базовые знания
и умения учащихся,
— содействовать формированию у
школьников алгоритмического мышления,
— развивать умение анализировать,
сопоставлять, делать выводы.
Учебный план
|
№ |
Тема |
Кол-во часов |
||
|
Всего |
Теория |
Практика |
||
|
1 |
Введение. |
1 |
0,5 |
0,5 |
|
2 |
Место моделирования |
3 |
2 |
1 |
|
3 |
Особенности построение |
12 |
4 |
8 |
|
4 |
Итоговое занятие, |
2 |
— |
2 |
|
Итого |
18 |
6,5 |
11,5 |
Учебно-тематический
план
|
№ |
Тема |
Кол-во часов |
||
|
Всего |
Теория |
Практика |
||
|
1 |
Введение. |
1 |
0,5 |
0,5 |
|
2 |
Место моделирования в деятельности человека; основные этапы |
2 |
1 |
1 |
|
3.1 |
Моделирование. Особенности построения моделей для электронной построение физических моделей движения тел. |
1 |
1 |
— |
|
3.2-3.4 |
Моделирование равномерного прямолинейного движения. |
3 |
1 |
2 |
|
3.5-3.7 |
Моделирование прямолинейного равноускоренного движения. |
3 |
1 |
2 |
|
3.8-3.10 |
Моделирование движения тела, брошенного под углом к горизонту. |
3 |
1 |
2 |
|
3.11-3.13 |
Моделирование |
3 |
1 |
2 |
|
4.1 |
Самостоятельная работа. Проект |
1 |
— |
1 |
|
4.2 |
Самостоятельная работа. Проект. |
1 |
— |
1 |
|
Итого |
18 |
6,5 |
11,5 |
1.2.
Содержание занятий.
1 занятие.
Цель урока –
повторить основные элементы электронных таблиц и действия в электронных
таблицах.
Учащиеся должны:
знать:
— интерфейс приложения Ms Excel;
— панели инструментов;
— абсолютную и относительную
адресацию ячеек;
— мастер функций;
— мастер диаграмм;
уметь:
— выделять столбцы, строки,
блоки, таблицы;
— осуществлять ввод чисел,
текста, формул;
— производить редактирование
данных;
— производить действия над объектами;
— производить расчеты с
использованием электронных таблиц;
— строить по результатам
расчетов графики функций.
В конце урока
провести несложные расчеты задачи движения тела и построить график этого
движения.
2 занятие.
Цель урока:
ввести понятие моделирования, понятие компьютерного эксперимента.
На уроке вводится
понятие моделирование, место моделирования в деятельности человека, основные
этапы моделирования, понятие компьютерного эксперимента. Особенности построения
моделей для электронной таблицы, построение физических моделей движения тел.
Рассматриваются
примеры построения моделей, использование компьютерного эксперимента для
демонстрации моделей (использование мультимедиа библиотеки школы). В конце
урока в качестве домашнего задания рассмотреть пример построения модели из
папки «Другие задачи».
3 занятие.
Цель урока:
рассмотреть особенности построения моделей для электронной таблицы, построение
физических моделей движения тел.
На уроке
рассматривается построение физических моделей в электронных таблицах.
Указывается на порядок расположения записей, оформление листа и книги
электронной таблицы. Указывается на необходимость последовательно вносить
физические величины, в том порядке, в котором производятся вычисления. При
вводе данных необходимо учитывать относительную и абсолютную адресации, при
воде формул необходимо учитывать порядок выбора данных, чтобы не было
циклических ссылок. Сам вычислительный эксперимент в электронных таблицах
возможно применять разнообразными способами. В большинстве случаев достаточно
применение простых операций над данными, используя вставку функций из меню.
С помощью
электронных таблиц возможно решать задачи, которые не решаются в школьном курсе
физике 9 класса. Учащимся можно показать, как используется метод приращений
для расчета движений тела под действием нескольких сил, какую роль играет
интервал приращений в оценке точности при выполнении расчетов. Как записываются
и рассчитываются приращения для времени, скорости, перемещения и других
величин. Как рассчитываются конечные величины с использованием приращений (эта
теоретическая часть изучается впоследствии в информатике в теме
«Программирование»). Сам метод приращений является сложным, поэтому он
последовательно применяется на занятиях 4 – 8. В своей итоговой работе ученики
могут использовать этот метод.
4 занятие.
Цель занятия: Построение моделей
физических процессов в среде MS Excel.
Последовательность построения модели
физического процесса в среде MS Excel
В экспериментальной физике
графическое моделирование физического процесса используется для различных
целей.
Во-первых, графики строят для того, чтобы определить некоторые величины, —
обычно наклон или отрез, отсекаемый на оси ординат, прямой, изображающей
зависимость между двумя переменными.
Во-вторых, и это, пожалуй, самое главное, графиками пользуются для наглядности.
Графический метод дает возможность
наглядно проследить вид функциональной зависимости рассматриваемых величин и их
закономерное изменение
Графики позволяют также более
наглядно проводить сравнение экспериментальных данных с теоретической кривой.
В-третьих, графиками пользуются в экспериментальной работе, чтобы установить
эмпирическое соотношение между двумя величинами.
Пусть две физические величины связаны между собой функциональной зависимостью
вида у=f(х). При этом значения переменной х задаются непосредственно
экспериментатором (независимая переменная); а переменной у — рассчитывается по
известной функциональной зависимости для каждого заданного значения переменной х.
Моделирование функциональной зависимости состоит в получении набора точек (хi,
yi) (индекс i=0, 1, 2, 3, …) и построении соответствующего графика. В более
сложных случаях количество независимых переменных может быть больше.
Моделирование функциональной
зависимости можно проводить по аналитическим (точным) формулам или по
приближенным, полученным в результате решения некоторого исходного уравнения
численным (приближенным) методом. Количество смоделированных точек при работе с
аналитическими формулами колеблется от нескольких десятков до нескольких сотен;
при численном решении количество точек берется от нескольких сотен до
нескольких тысяч.
Все величины, входящие в
функциональную зависимость, разделяют на постоянные и переменные. Это
разделение необходимо для определения вида ссылки (абсолютная или
относительная, соответственно) при создании формулы.
Последовательность создания модели
1.
Составить
математическую модель процесса или выписать все расчетные формулы.
2.
На
рабочем листе заполнить таблицу исходных данных, которая должна включать в
себя:
1) начальные значения величин х и у, а также всех других, входящих в расчетные
формулы (например, начальная скорость, начальная координата и т.д.);
2) значения величин, входящих в функциональную зависимость (например, угол, под
которым произведен бросок);
3) границы изменения независимой переменной xo=хmin и хmax и/или шаг ее
изменения delta x = (xmax-xmin)/n, где n – подинтервалов, на которые
разбивается отрезок (x0=xmin; xmax) , т.е созданная таблица будет содержать n+1
точку);
4) значения табличных данных и констант (математических и физических).
3.
Выполнить
(при необходимости) перевод величин из одной системы единиц в другую.
4.
Составить
на основе расчетных формул рабочие формулы для вычисления всех переменных
величин с указанием вида ссылки на каждую из ячеек, содержащую необходимые
числовые данные. Ссылка на любые величины из таблицы исходных данных должна
быть абсолютной.
5.
На том же
или отдельном листе (Расчеты) заполнить таблицу данных – содержит значения
переменных х и у (т.е. смоделированные точки). При этом начальные значения
переменных, как правило, копируются с установлением связи из таблицы исходных
данных. Каждое следующее значение независимой переменной отличается от
предыдущего на величину шага delta х. Значения переменной у рассчитываются по рабочим
формулам для каждого значения переменной х.
6.
Построить
график зависимости у(х): тип диаграммы – Точечная, вид определяется источником
числовых данных (так, для экспериментальных данных, полученных с некоторой
погрешностью, используется только вид — Точечная; при вычислении же значений
переменных по формулам вид диаграммы, как правило, выбирается Точечная с
маркерами (или без них), соединенными сглаживающими отрезками).
7.
Проверить
работу модели, изменяя исходные данные. Сделать вывод о границах ее
применимости и особенностях протекания данного процесса.
8.
Добавить
на лицевом листе модели таблицу для расчета контрольной точки, где значение
переменной х берется из интервала (xmin; xmax), а значение переменной у
рассчитывается по известной функциональной зависимости для выбранного значения
переменной х.
9.
Выполнить
предлагаемые в модели задания, решить задачи на данную тему.
5-7 занятия.
Цель: Моделирование равномерного
движения тела.
Рассмотрим моделирование такого
физического процесса, как движение тела с некоторой постоянной скоростью .
Поскольку ни одна из характеристик скорости (направление и величина) не
изменяется, движение будет происходить вдоль прямой линии, т.е. является
прямолинейным. Совместим с этой прямой ось ОХ. Каждую секунду координата x тела
будет получать одно и то же приращение, поэтому в любой момент времени может
быть найдена как x=Vx*t, где Vx — проекция вектора скорости на ось ОХ. Если в
начальный момент времени (t0 = 0) положение тела не совпадало с началом
отсчета, то уравнение будет иметь вид: x(t)=xo+Vx*t .
Проекция вектора скорости – величина
алгебраическая, т.е. она может быть и положительной, и отрицательной в
зависимости от того, какой угол alpha образует вектор скорости с направлением
оси ОХ. Если alpha=0 , Vx>0, т.е. в этом случае Vx=V, где V — модуль вектора
скорости, если alpha=180, V<0, и, следовательно, Vx=-V.
Графическое моделирование процесса
равномерного прямолинейного движения будет заключаться в построении графика
зависимости при различных значениях и направлениях скорости.
 Переменные величины: время и координата тела; постоянные
Переменные величины: время и координата тела; постоянные
– проекция скорости на ось ОХ (это означает, что ее числовое значение в
процессе движения не изменяется). Для построения графика x=f(t) необходимо
получить определенное число точек (t; x). Следовательно, необходимо задать шаг
изменения переменной t — delta t, рассчитываемый через временной интервал и
число точек или подинтервалов, на которые разбивается весь интервал: delta
t=(tmax-tmin)/n.
Выводы
1.
Изменение
величины delta t не влияет на вид графика.
2. При увеличении проекции вектора скорости на ось OX, по оси «Коодината
x», происходит масштабирование графика функции.
3. При увеличении значения начальной координаты X0 можно увидеть, что график
функции будет распологаться выше оси OX на величину X0, и наоборот (при
уменьшении — ниже оси).
4. При изменении начальных данных в ячейках tmax и delta t вид графика почти не
изменяется (как указывалось выше), за исключением того, что график изображается
уже с масштабированием по обоим осям.
5. Зададим отрицательное значение проекции скорости. Вид графика изменился,
т.к. вид графика перемещения тела зависит от знака проекции вектора скорости
точки на данную координатную ось. Если в первом случае угол, который образует
вектор скорости с направлением оси OX был равен 0 град, то теперь этот угол
=180 град. По отношению к физике — он показывает обратное направление движения.
6. Знак «-» в значении координаты означает, что график будет смещен
вниз на величину |x|.
8-10 занятие.
Цель: Моделирование равноускоренного движения тела
Рассмотрим прямолинейное
равноускоренное движение ( a=const).
Поскольку движение происходит вдоль прямой, то для его описания достаточно
одной координаты. Пусть тело движется вдоль оси OY. Согласно определению,
ускорение рассчитывается по формуле
 где в числителе стоит изменение скорости, а в
где в числителе стоит изменение скорости, а в
знаменателе — промежуток времени, за который это изменение произошло. Отсюда ![]() Поскольку движение
Поскольку движение
равноускоренное, каждую секунду скорость получает одно и то же приращение.
Перепишем это выражение в проекции на выбранное направление оси OY:
![]() . Проекции скорости и ускорения могут быть как
. Проекции скорости и ускорения могут быть как
положительными, так и отрицательными в зависимости от взаимного направления
векторов V, V0, a и
оси OY. При этом, если ay>0 (ay=a, где a — модуль вектора ускорения),
скорость получает положительное приращение, т.е. с течением времени она
увеличивается (ускоренное движение); если ay<0, скорость с течением времени уменьшается
(замедленное движение). Координата тела при этом будет изменяться по закону:
![]() где y0 —
где y0 —
начальное положение тела, т.е. его координата в момент времени t0=0.
Дополнительные
задачи для домашнего задания.
11-13 занятия.
Цель: Моделирование движения тела,
брошенного под углом к горизонту
Рассмотрим случай движения тела,
брошенного под углом к горизонту, происходящего только под действием силы
тяжести (трением
пренебрегаем).
В этом случае одной координаты для
описания движения недостаточно. Необходимо ввести систему координат XOY, при
этом ось OX направляют горизонтально, а ось OY – вертикально вверх или вниз. Теперь
положение тела задается двумя координатами (x, y), каждая из которых с течением
времени будет изменяться. Закон изменения координат можно установить из
следующих соображений.
Поскольку мы считаем, что никакие
силы, кроме силы тяжести на тело не действуют, движение вдоль оси OX будет
равномерным, и абсцисса тела меняется по закону x=Vx*t, где ![]() — проекция скорости на ось OХ.
— проекция скорости на ось OХ.
Зададим систему координат YOX так,
что ось OY направлена вертикально вверх, с началом координат у поверхности
земли.
Сила тяжести, действующая на тело,
сообщает ему ускорение g, направленное, как и сама сила, вертикально вниз.
Поэтому проекция скорости на ось OY будет меняться по закону ![]() , гдеV0y, gy — проекция начальной
, гдеV0y, gy — проекция начальной
скорости и ускорения свободного падения на эту ось.
Ордината тела с течением времени
изменяется как ![]() .
.
Уравнение траектории, т.е. зависимость y(x), можно найти, исключив время из
последнего выражения. Выразим время через абсциссу: t=x/V0x и подставим в
уравнение ординаты: ![]() ,
,
где знаки проекций V0x, V0y зависят от направления осей координат.
В каждой точке траектории скорость
тела направлена по касательной к ней и может быть разложена на две составляющие
![]() , где Vx=V0x.
, где Vx=V0x.
Модуль скорости при этом ![]() .
.
В данной работе можно проследить за
взаимосвязями следующих величин: x и t, y и t, y и x, и, кроме того, установить,
как зависит дальность полета тела от угла, под которым его бросают, и от
величины его начальной скорости.
Для построения траектории движения
тела нужны формулы, позволяющие рассчи-тать координаты точки в различные
моменты времени:

а также дополнительные формулы для
вычисления проекций начальной скорости на оси координат OX и OY, перевода
градусной меры угла в радианы, интервала времени .
Проанализировать все рассмотренные
выше формулы и выделить исходные данные, переменные и постоянные величины.
|
|
|


Выводы
1. При изменении у0 происходит
смещение графика по оси ОУ. При у0>0 дальность полета увеличивается. При у0<0
дальность полета, соответственно, уменьшается .
2.При изменении V0 происходит изменение экстремума функции у(х) и масштабирование
графика по обоим осям. При увеличении V0 дальность полета увеличивается, при
уменьшении — соответственно уменьшается.
3. При увеличении tmax ордината одного или нескольких тел становится
отрицательной.
Наибольшая дальность полета наблюдается при значении угла 45 град!
Таким
образом, мы рассмотрели математическую модель равноускоренного движения, а
графическое моделирование будет заключаться в построении графиков зависимостей Vy=f(t) и y=f(t) при
различных значениях ay, V0y.
Анализ формул показывает, что
исходными данными в нашей модели будут:
1) координата тела уo в
момент времени, принимаемый за нулевой;
2) проекция начальной скорости на выбранную ось Voy;
3) проекция ускорения на выбранную ось ay;
4) временной интервал tmin — tmax,
в течение которого рассматривается движение.
Переменные
величины –
время, скорость и координата (они изменяются в процессе движения); постоянные – проекции ускорения и
начальной скорости на выбранную ось (в процессе движения остаются неизменными).
Дополнительные
задачи для домашнего задания.
14-16 занятия.
Цель:Моделирование колебательного
движения на примере математического маятника
Смещение тела, совершающего
механические гармонические колебания, с течением времени изменяется по закону
косинуса или синуса:
![]() где A – амплитуда
где A – амплитуда
движения,![]() — фаза
— фаза
колебаний,![]() — начальная
— начальная
фаза, ![]() — собственная
— собственная
циклическая (круговая) частота колебаний.
Скорость – первая производная координаты по времени, и ускорение – вторая
производная координаты по времени, при этом также будут изменяться по
гармоническому закону:

Для преобразования выражений мы
воспользовались формулами приведения.
Отсюда видно, что скорость опережает
смещение по фазе на pi / 2, а ускорение — на pi, т.е. находится в противофазе
со смещением.
Примером одной из самых простых и
распространенных моделей колебательных систем является математический маятник –
идеализированная система, состоящая из материальной точки, массой m,
подвешенной на невесомой нерастяжимой нити длиной L и совершающей колебания в
вертикальной плоскости.
В случае малых углов отклонения, когда alpha<<1 рад., колебания маятника
можно считать гармоническими. Круговая частота гармонических колебаний
математического маятника в этом случае принимается равной
![]() период колебаний –
период колебаний –![]()
Примечательно, что в случае свободных колебаний круговая частота и период
колебаний определяются свойствами самой системы и не зависят от начальных
условий (начального смещения или, что то же самое, начальной фазы).
 Условие alpha<<1 рад. позволяет
Условие alpha<<1 рад. позволяет
свести формулы колебательного движения маятника к гармоническому виду
относительно горизонтальной оси координат ОХ.
Цель настоящей работы заключается в
том, чтобы построить графики зависимости x(t), v(t), a(t) и проследить за их
изменением при изменении параметров системы.
Перед началом работы с таблицей
необходимо разобрать ее строение и расположение данных в ячейках, а также
расчетные формулы, используемые для вычислений смещения, скорости и ускорения
колеблющегося тела.
Для создания ограничения ввода
исходных данных (alpha<5 град.) в ячейку таблицы B11 вставлено примечание: «(!)
Амплитуда угла меньше 5 град.». Вставка примечания в ячейку осуществляется по
команде MS Excel Вставка-Примечание…
При задании численного значения в ячейку C11 большего 5, в ячейке В10
появляется красная надпись «Ошибка ввода! Амплитуда угла отклонения меньше 5
град.» (1).
Для этого в ячейку В10 введена
формула:
=ЕСЛИ(ABS(C11)>5;»Ошибка ввода! Амплитуда угла отклонения меньше 5
град.»;»»)
Заполнение таблицы
1. Занести исходные числовые данные в
следующие ячейки:
1) амплитуду угла отклонения, град – в С11;
2) длину маятника, м – в С12;
3) конечный момент времени, с – в С17;
4) начальную фазу колебаний, град – в С19.
(!) Начальный момент времени (ячейка С16) удобно принять равным нулю
Пример числовых данных:
alpha max=2 град.; L=1 м; tmax=10 c; phi=30 град.
2. Для дальнейших действий необходимо
перевести углы, заданные в градусах, в радианы, так как тригонометрические
функции, используемые при расчетах координаты, скорости и ускорения, вычисляют
значение угла, заданного в радианах. Ввести формулы, позволяющие рассчитать
период, частоту колебаний, амплитуду отклонения по координате, а также интервал
времени delta t.
Период колебаний.
 , g=9,81 – ускорение
, g=9,81 – ускорение
свободного падения
Ввести формулу в ячейку С13:
=2*ПИ()*КОРЕНЬ(C12/9,81)
Круговая частота : ![]() .
.
Ввести формулу в ячейку С14:
=2*ПИ()/C13
Амплитуда :![]() .
.
Ввести формулу в ячейку С15:
=E11*C12
Вычисление шага ![]() .
.
Ввести формулу в ячейку С18:
=(С17-С16)/100
Здесь n=100 – количество интервалов , на которые разбивается выбранный
промежуток времени . Таким образом, таблица будет содержать n+1 = 101 точек.
5. Заполнить Таблицу данных «Время-Координата-Скорость-Ускорение».
1) Столбец G должен содержать значения времени, отличающиеся на величину delta
t. Заполнение столбца начнем с ячейки G8:
=С16
Тем самым содержимое ячейки С16 (начальный момент времени) копируется в ячейку G8
и одновременно устанавливается связь между ячейками: при изменении содержимого
ячейки С16 значение в ячейке G8 также автоматически изменится.
2) В ячейку G9 ввести:
=G8+$C$18
$C$18 – абсолютная ссылка на ячейку с константой .
3) Скопировать данную формулу в диапазон ячеек G10:G108 следующим образом:
— выделить ячейку G9;
— скопировать ее содержимое в буфер командой Правка-Копировать;
— выделить диапазон ячеек G10:G108;
— провести вставку формулы из буфера командой Правка-Вставить.
4) В столбцах H, I, J содержатся значения координаты, скорости и ускорения,
вычисляемые в соответствующие моменты времени из столбца G. Ввести в ячейки H8:J8
нужные формулы:
Координата![]() .
.
Ввести формулу в ячейку H8:
=$C$15*SIN($C$14*G8+$E$19)
Скорость![]() .
.
Ввести формулу в ячейку I8:
=$C$14*$C$15*COS($C$14*G8+$E$19)
Ускорение ![]() .
.
Ввести формулу в ячейку J8:
= – $C$14^2*$C$15*SIN($C$14*G8+$E$19)
5) Выделить блок ячеек H8:J8 и
скопировать формулы в диапазон H9:J108 (см. пп. 3)).
6. Изменить имя листа, содержащего
таблицу («Модель 3»), например, на «Колебания маятника». После окончания ввода
нажать клавишу {Enter} или щелкнуть мышкой в рабочем поле листа.
Таблица заполнена.
Построение графиков
По результатам расчетов необходимо
построить три графика: x(t), v(t) и a(t). Поскольку во всех случаях по оси Ox
откладывается одна и та же величина (время), все три зависимости можно
представить в одной системе координат. Такой способ построения применяется в
тех случаях, когда необходимо провести сравнение нескольких различных
(неоднородных) величин или исследовать поведение некоторой величины в
зависимости от начальных условиях или условий проведения эксперимента. Однако
он имеет и недостатки: он применим только тогда, когда сравниваемые величины
имеют один и тот же порядок.
 1. Выделить диапазон ячеек G8:J108,
1. Выделить диапазон ячеек G8:J108,
содержащих все необходимые данные. Программа Excel автоматически будет
рассматривать этот диапазон как три ряда данных, а именно:
1-ый ряд G8:H108 – зависимость координаты от времени;
2-ой ряд G8:G108; I8:I108 – зависимость скорости от времени;
3-ий ряд G8:G108; J8:J108 – зависимость ускорения от времени,
причем первая колонка (диапазон G8:G108) будет общей для всех остальных.
2. Выполнить команду Вставка-Диаграмма…
3. Провести пошаговое построение диаграммы:
Шаг 1. В диалоговом окне Тип диаграммы на
вкладке Стандартные указать тип диаграммы Точечная и вид – «Точечная диаграмма
со значениями, соединенными сглаживающими линиями» или «Точечная диаграмма со
значениями, соединенными сглаживающими линиями без маркеров». Нажать кнопку Далее.
Шаг 2. В окне Источник данных диаграммы на вкладке Диапазон данных проверить,
что диапазон данных выбран правильно и установлен флажок опции «Ряды в
столбцах».
Дать названия наборам точек: выбрать вкладку Ряд и в списке названий рядов
данных (поле Ряд) выделить имя первого набора – «Ряд 1», после чего в поле Имя:
ввести название – «Смещение». Аналогичным образом задать имена двух следующих
рядов данных – «Скорость» и «Ускорение». Как видно из рисунка, все маркеры
(точки) и сглаживающие линии графиков различны по цвету. Кроме того, маркеры
имеют различную форму. Для того, чтобы различать графики, на диаграмме
выводится так называемая легенда – сведения о способе вывода того или иного
графика (цвет линии, цвет и форма маркеров, название соответствующего им ряда
данных). Нажать кнопку Далее.
Шаг 3. Задать параметры диаграммы (окно Параметры диаграммы):
— на вкладке Заголовки ввести название диаграммы и наименование осей координат
с указанием единиц измерения величин, откладываемых по этим осям, следующим
образом:
— в поле Название диаграммы – «Графики колебательного процесса»;
— в поле Ось Х (категорий) – «Время t, с»;
— в поле Ось Y (значений) – «x (м); v (м/с); a (м/c2)»;
— на вкладке Линии сетки включить или отключить основные и промежуточные линии
сетки по каждой из осей;
— на вкладке Легенда установить флажок опции «Добавить легену» и указать ее
размещение на диаграмме. Нажать кнопку Далее;
Шаг 4. Выбрать расположение диаграммы на отдельном листе и ввести имя  листа в соответствующем поле.
листа в соответствующем поле.
Нажать кнопку Готово.
Задание 1
1. Изменяя начальные данные (начальное смещение и фазу, длину маятника),
проследить за изменением вида графиков.
2. Разобрать вопрос о соотношении величин xmax и L.
3. Определить сдвиг фаз между колебаниями каждой пары величин. Это удобно
выполнить для случая, когда начальная фаза колебаний равна нулю.
4. Задать для диапазона G8:J108 соответствующий формат числовых данных
(числовой или экспоненциальный с определенным количеством десятичных знаков
после запятой).
5. Изменяя момент времени tmax (и, тем самым, — интервал delta t), определить
границы применимости данной модели.
6. Добавить в таблицу исходных данных контрольные точки для заданного момента
времени и вывести их на всех графиках.
Построение отдельных графиков
Провести построение каждого графика в
отдельности.
Построение графика зависимости x(t)
1. Выделить диапазон ячеек G8:H108,
содержащий данные для построения графика. Значения в столбце G (диапазон G8:G108)
будут откладываться по оси Oсь Х (время), значения в столбце H (диапазон H8:H108)
– по оси Oсь Y (координата).
2. Выбрать команду Вставка-Диаграмма…
3. Шаг 1. В диалоговом окне Тип диаграммы выбрать тип диаграммы Точечная и вид
– «Точечная диаграмма со значениями, соединенными сглаживающими линиями» или
«Точечная диаграмма со значениями, соединенными сглаживающими линиями без
маркеров». Нажать кнопку Далее.
Шаг 2. В окне Источник данных диаграммы на вкладке Диапазон данных проверить
правильность выбора диапазона и установить при необходимости флажок опции «Ряды
в столбцах». На вкладке Ряд задать название данного ряда данных, например, «Зависимость
x от t» или «Смещение». Нажать кнопку Далее.
Шаг 3. Задать параметры диаграммы (окно Параметры диаграммы):
— на вкладке Заголовки ввести название диаграммы и наименование осей координат
с указанием единиц измерения величин, откладываемых по этим осям, следующим
образом:
— в поле Название диаграммы – «График зависимости координаты от времени»;
— в поле Ось Х (категорий) – «Время t, с»;
— в поле Ось Y (значений) – «Координата x, м»;
— на вкладке Линии сетки включить или отключить основные и промежуточные линии
сетки по каждой из осей;
— на вкладке Легенда снять флажок опции «Добавить легенду» и нажать кнопку Далее;
Шаг 4. Выбрать расположение диаграммы на отдельном листе и ввести имя листа в
соответствующем поле. После этого нажать кнопку Готово.
Построение графиков v(t) и a(t)
провести аналогичным образом.
Замечание: Указывая диапазон данных, приходится
выделять одновременно два блока ячеек: G8:G108 и I8:I108 для графика скорости;
G8:G108 и J8:J108 для графика ускорения. В этом случае после выделения первого
блока (G8:G108) выделяют другой (I8:I108 или J8:J108), удерживая при этом
нажатой клавишу {Ctrl}.
Дополнительные
задачи для домашнего задания.
17-18 занятия
Цель:Выполнение итоговой работы: Моделирование
свободного падения с учетом сопротивления среды.
ЗАКЛЮЧЕНИЕ
Предлагаемый в данном курсе
теоретический и задачный материал был апробирован с учащимися 9 классов на
уроках информатики при изучении темы «Табличные вычисления на компьютере». На
занятиях при использовании электронных
таблиц значительно возрастают возможности для сотрудничества между всеми
участниками учебного процесса. Диалог в виде проблемной беседы, обсуждения
осуществляется на занятиях по решению задач и моделированию, в лабораторном
практикуме. Обсуждаются результаты выполненных с использованием компьютера и
предъявленных на электронном носителе домашних заданий. Это могут быть
результаты решения задач, представляемых в виде численных моделей, результаты
исследования «готовых» моделей, полученных от учителя, презентации. Обсуждению
подлежат цели, условия, порядок проведения измерений и обработки данных,
первичные, промежуточные и конечные результаты. Можно отметить возможность
выдвижения учениками гипотез и их быстрой проверки при вводе в компьютер новых
данных. Для организации взаимодействия, коммуникации во всех случаях
целесообразно использовать мультимедийный проектор.
Занятия помогли
ученикам в дальнейшем при изучении курса информатики «Введение в
программирование», развили умения и навыки работы в электронных таблицах,
помогли расширить знания о различных физических процессах и их применении на
практике.
Предлагаемый курс
по выбору окажет помощь в повторении отдельных изученных ранее тем и улучшит
подготовку учащихся 9 класса к итоговой аттестации по физике и информатике,
поможет определиться с дальнейшим профилем обучения.
Библиография
·
«Моделирование
физических процессов. Лабораторный практикум MS Excel». ОСО-2008,
Информатика и ИКТ http://oco.apkpro.ru/info/Model/mdl.htm
·
Физика.
Механика. 10 кл. Профильный уровень: учебн. для общеобразовательных учреждений
/ М.М. Балашов, А.И. Гомонова, А.Б. Долицкий и др.; под ред. Г.Я. Мякишева –
9-е изд., стереотип. – М.: Дрофа,2007.
·
Физика :
Учеб. для 10 кл. с углубл. изучением физики / О.Ф. Кабардин, В.А. Орлов, Э.Е.
Эвенчик и др.; Под ред. А.А. Пинского, О.Ф. Кабардина. – 8-е изд., перераб. и
доп. – М.: Просвещение, АО «Моск. учеб.», 2005.
Приложение 1 .
Дополнительные
задачи для домашнего задания.
2.
Автомобиль
первую половину пути s1 = s/2 прошёл со скоростью v1 = 60 км/ч, оставшуюся часть пути (s2 и s3 ) – со скоростью v2 = 20 км/ч, два последний участок пути s3 – со скоростью v3 = 35
км/ч. Найдите среднюю скорость vср автомобиля на всём пути.
Дополнительные
задания повышенного уровня:
а) варьируя
скорости на участках пути, найдите скорость движения автомобиля на всём
пути;
б) выполните
задачу в электронной таблице и получите график зависимости средней скорости
автомобиля от скорости его движения на первой половине пути, если последней
задавать различные значения, сохраняя постоянными значения скоростей автомобиля
на втором и последнем участках пути.
2. Между двумя
пунктами, расположенными вдоль реки на расстоянии s = 200
км один от другого, курсирует теплоход. Он проходит это расстояние по течению
за время t1 = 6 ч, а против течения – за t2 = 8 ч. Определите скорость течения
реки v1 и скорость теплохода v2 относительно стоячей воды.
Дополнительные
задания повышенного уровня:
а) варьируя
расстояние между двумя пунктами, найдите скорость течения реки и скорость
теплохода в стоячей воде;
б) выполните
расчеты в электронных таблицах и получите график зависимости скорости
теплохода в стоячей воде от расстояния между двумя пунктами, задавая последнему
различные значения. Заданное по условию время движения остаётся неизменным.
3. Автомобили
типа «Жигули» и «Волга» движутся прямолинейно и равномерно в одном направлении
со скоростями v1 = 90
км/ч и v2 = 108
км/ч. В начальный момент времени расстояние между ними равно 15
км. Через какое время «Волга» догонит идущие впереди неё «Жигули»?
Дополнительные
задания повышенного уровня:
а) варьируя
скорости автомобилей, определите, через какое время «Волга» догонит «Жигули»;
б) выполните расчеты
в электронных таблицах и получите графики зависимости координат автомобилей от
времени движения.
По графикам
определите время, через которое автомобиль «Волга» догонит автомобиль «Жигули».
4. Тело брошено
вертикально вверх со скоростью v0 = 30 м/с. Начальная
координата х0 = 0. Определите путь, пройденный телом за время,
равное 1,2,3,4,5 с. (Сопротивлением воздуха можно пренебречь.)
Дополнительные
задания повышенного уровня:
а) варьируя
время, найдите путь, пройденный телом;
б) выполните
расчеты в электронных таблицах и получите график зависимости пути, пройденного
телом, от времени движения, задавая последнему значения первых пяти секунд, но
сохраняя при этом постоянным значение начальной скорости.
5. Из аэростата,
находящегося на высоте h0 = 540
м, выпал груз. Через какой промежуток времени t груз достигнет поверхности Земли, если аэростат поднимется
со скоростью v0 = 6 м/с? (Сопротивлением воздуха
можно пренебречь.)
Дополнительные
задания повышенного уровня:
а) варьируя
высоту полёта аэростата, определите промежуток времени, через который груз
достигнет поверхности Земли;
б) выполните
расчеты в электронных таблицах и получите график зависимости промежутка
времени, через который груз достигнет поверхности Земли, от высоты полёта
аэростата, задавая последней различные значения при неизменной скорости
подъёма.
6. Тело брошено
под углом α к горизонту с начальной скоростью v0 = 20 м/с. Начальные координаты: x0 = 0
м, у0 = 100 м. Определите время полёта tп, дальность полёта, координаты х и у,
а также проекции скоростей vx и vу в моменты времени t, равные 0, 1, 2, …, 10 с,
максимальную высоту подъёма hм. Поместите в таблицу
результаты для углов α, равных 0˚, 10˚, 20˚, …, 90˚. (Сопротивлением воздуха
можно пренебречь.)
Дополнительные
задания повышенного уровня:
а) выполните
расчеты в электронных таблицах и выведите таблицу результатов;
б) выполните
расчеты в электронных таблицах и получите график зависимости координаты у от
координаты х тела для разных углов бросания.
7. Автомобиль
«Волга» движется по горизонтальному участку пути со скоростью Vo= 72
км/ч. Водитель, заметив препятствие, нажимает на тормоз. Определите тормозной
путь s автомобиля, если коэффициент
трения k=0,25.
Дополнительные
задания повышенного уровня:
а) варьируя
начальную скорость, найдите тормозной путь автомобиля;
б) выполните
расчеты в электронных таблицах и получите график зависимости тормозного пути
автомобиля от скорости, задавая последней различные значения, но сохраняя при
этом постоянным коэффициент трения.
8. Грузовой
автомобиль массой m=6 т движется на подъеме со
скоростью U=5 м/с. Угол наклона А=100.
Определите коэффициент трения K, если
мощность двигателя N= 100 кВт.
Дополнительные
задания повышенного уровня:
а) варьируя
скорость автомобиля, определите коэффициент трения;
б) выполните
расчеты в электронных таблицах.
9. Шар массой m=0,4 кг привязан нитью к подвесу и
описывает окружность в горизонтальной плоскости. Какова длина l , если угол А, который она
составляет с вертикалью, равен 350? Скорость шара U=6 м/с.
Дополнительные
задачи повышенного уровня:
а) варьируя угол,
который составляет нить с вертикалью, найдите длину нити
б) выполните
расчеты в электронных таблицах и получите графики движения к задаче.
10. Средняя
высота спутника h, который находится над
поверхностью Земли, равна 2000 км. Определите скорость U спутника и период обращения Т, если
радиус земли R=6400 км, масса Земли М=6*1024
кг. Гравитационная постоянная G=6, 67*10-11 Н*м2/кг2
Дополнительные
задания повышенного уровня:
а) варьируя
высоту спутника над поверхностью Земли, определите скорость и период обращения
спутника;
б) выполните
расчеты в электронных таблицах и получите на графики зависимостей скорости и
периода от высоты над поверхностью Земли, задавая высоте различные значения.
11. На движущемся
теплоходе вертикально вверх бросили мяч. Выполните расчеты в электронных
таблицах и получите график траектории движения мяча: а) относительно берега;
б)относительно теплохода. По какой траектории будет двигаться мяч относительно
берега, если его бросают вертикально вниз в воду? Смоделируйте траекторию
движения мяча для этого случая.
12. Шар массой m1 свободно падает на тележку массой m2 , движущуюся со скоростью U1.С какой скоростью и в каком
направлении будет двигаться тележка? Выполните расчеты в электронных таблицах и
получите графики динамической модели движения тел до и после их
взаимодействия.
Муниципальное автономное общеобразовательное учреждение
«Средняя общеобразовательная школа №1» г. Боровичи
Проект
«Моделирование гармонических колебаний в среде табличного процессора Microsoft Excel»
|
Подготовила: Ученица 11 «А» класса Январева Мария Руководитель: Васильева Надежда Владимировна 2021г. г. Боровичи |
|
|
Содержание Введение 1. Теоретическая часть 1.1 Гармонические колебания: понятие, основные параметры 1.2 Уравнение гармонического колебания 1.3 Табличный процессор MS Excel: понятие, основные инструменты 2. Практическая часть 2.1 Заполнение исходных параметров колебаний в таблице 2.2 Создание полосы прокрутки в MS Excel 2.3 Создание графика в MS Excel Заключение Список Литературы |
Введение
В школьной программе по предмету «физика» изучаются гармонические колебания. Однако в действительности осуществить эксперименты, в которых можно наблюдать и изучать колебательный процесс и его характеристики сложно. Microsoft Excel является отличным средством для моделирования различных динамических процессов. В этой работе с помощью функций MS Excel можно исследовать влияние параметров колебательного процесса на график колебаний.
Цель: смоделировать гармонические колебания с помощью табличного процессора Microsoft Excel.
Гипотеза: если изучить инструментарий табличного процессора Microsoft Excel, то с его помощью можно моделировать физические процессы.
Предмет: программа Microsoft Excel, как среда моделирования гармонических процессов.
Объект: График гармонических колебаний.
Задачи:
1) Изучить теоретический материал по теме Гармонические колебания.
2) Изучить теоретический материал о табличном процессоре Microsoft Excel.
3)Практически смоделировать Гармонические колебания в табличном процессоре Microsoft Excel.
1. Теоретическая часть
1.1 Гармонические колебания: понятие, основные параметры
Колебательное движение — это движение, точно или приблизительно повторяющееся через одинаковые промежутки времени, при котором тело многократно и в разных направлениях проходит положение равновесия.
Гармонические колебания – колебания, при которых физическая величина изменяется с течением времени по гармоническому закону.
Рис 1. График синусоиды
1.2 Уравнение гармонического колебания
x = a*sin*(ω*t+φ0)
- x – смещение тела
- a – амплитуда колебаний
- ω – циклическая частота колебаний
- t – время
- φ0 – начальная фаза колебаний
Период колебаний (T) – это минимальный промежуток времени, через который происходит повторение движения тела.
Τ= t / n
Начальная фаза колебания (φ0) — это фаза колебаний в начальный момент времени.
Циклическая (круговая) частота (ω) — это число колебаний тела за 2π с.
ω0 = 2π/T = 2πν
Амплитуда колебаний (a) — максимальное смещение от положения равновесия.
Это уравнение дает зависимость «x» от времени «t».
1.3 Табличный процессор MS Excel: понятие, основные инструменты
Microsoft Excel – это универсальная программа для работы с электронными таблицами, которая позволяет хранить, организовывать и анализировать информацию. В ней можно вести домашний бюджет, производить простые или сложные расчеты, организовывать дневники, составлять отчеты, строить графики, диаграммы и многое другое.
Основные инструменты MS Excel: рабочее поле, ячейка, диапазон ячеек, символьные и строковые величины, логические величины, формулы.
Рабочее поле – это экран дисплея, на котором электронная таблица предоставляется в виде прямоугольника, разделенного на строки и столбцы.
Ячейка – минимальный элемент электронной таблицы, над которым можно выполнять те или иные операции. Каждая ячейка имеет уникальное имя. Например: B2, C17, G150 и т.д.
Диапазон ячеек – его можно выделить из подряд идущих ячеек в строке, столбце или прямоугольнике. При задании диапазона указывают его начальную и конечную ячейки. Примеры диапазонов – A1:A100, B15:AZ12.
Для моделирования гармонических колебаний можно использовать:
1)Формулы
2)Полосы прокрутки
3)График
2. Практическая часть
2.1 Заполнение исходных параметров колебаний в таблице
Ячейки электронной таблицы заполнены следующим образом: в ячейке B6 — значение амплитуды (a); B8 – значение круговой частоты (ω); B10 – значение фазы колебаний (α). Каждая из этих ячеек имеет формулу: B6 (=C6/10); B8 (=C8); B10 (=C10/100). (Заменим «φ0» на «α»).
В столбце G вычисляются значения времени, возрастающие на 0,02, для этого в G4 введена формула (=G3+0,02).
В столбце H вычисляются значения X по формуле (=$B$6*SIN($B$8*G…+$B$10)) , где G меняется в зависимости от выбранной ячейки (заполняем с H3 вниз аналогичным способом). Для наглядности в ячейках G и H значения времени и координаты продолжены до 160 строчки.
В режиме отображения формул таблица выглядит следующим образом:

Рис.2. Режим отображения формул
В режиме отображения значений:

Рис.3. Режим отображения значений
2.2 Создание полосы прокрутки в MS Excel
С целью исследования влияния параметров гармонических колебаний на график колебательного процесса используем такую возможность как полосы прокрутки. Для каждой полосы прокрутки установлены максимальное и минимальное значение. Каждая полоса прокрутки привязана к соответствующей ячейке. Поправка положения ползунка на полосе прокрутки приводит к изменению значения в ячейке. Таким образом, изменяя значения амплитуды, круговой частоты и начальной фазы колебаний, можно наблюдать изменение графика.
- Через меню Разработчик (Вставить/Элементы ActiveX) выбираем элемент «Полоса прокрутки».
- Выбрав нужные ячейки, нужно вставить туда полосу прокрутки (меняем размер).
- После вставки Полосы прокрутки она становится выделенной. Если нажать на любое другое место листа, то Полоса прокрутки перестанет быть выделенной.
- Нажимаем на Полосу прокрутки правой кнопкой мыши и выбираем «Свойства».
- В свойствах меняем значения «Max» и «Min» на те, которые необходимы (на 10 и 0, соответственно).
- Чтобы привязать полосу прокрутки в строке «LinkedCell» выбираем ячейку, где будут находиться значения колебания.
- Также можно изменить цвет полосы, для этого нужно найти строчки «BackColor» и «ForeColor». «BackColor» меняет фон полосы, а «ForeColor» цвет стрелок и ползунка.
- Полоса прокрутки готова.
Полосы прокрутки находятся в ячейках D6E6, D8E8, D10E10 и привязаны к ячейкам C6, C8, C10. Полосы прокрутки меняют значения в этих ячейках от 0 до 10, так как установлено максимальное и минимальное значение.
2.3 Создание графика в MS Excel
- Выделяем таблицу от G3 и H3 до G160 и H160, и переходим во вкладку «Вставка». Нажимаем на кнопку «График» и выбираем самый простой из них (находится на первом месте).
- Программа произвела построения графика, но как видим, появилось две линии, нужно удалить одну из них (удалим линию «t»).
- Легенда тоже не нужна, так как на графике всего одна линия. Поэтому нужно удалить легенду.
- Теперь нужно значения в горизонтальной панели координат заменить на те, которые соответствуют столбцу «t» в таблице.
- Нажимаем правой кнопки мыши на график. В меню перемещаемся по значению «Выбрать данные…».
- В активировавшемся окне выбора источника нажать на правую кнопку «Изменить».
- Запускается окошко «Подписи оси». В области «Диапазон подписей оси» указываем координаты массива с данными столбца «t». Ставим курсор в полость поля, а затем, произведя необходимый зажим левой кнопки мыши, выделяем все значения соответствующего столбца таблицы, исключая лишь его наименование. Как только координаты отобразятся в поле, клацаем по наименованию «OK».
- В окне выбора источника данных нажимаем на «ОК».
- Далее выбираем «Режим Конструктора» и нажимаем на график левой кнопкой мыши. Находим и нажимаем на «Макет», переходим во вкладку «Оси». В самом низу находится «Дополнительные параметры основной горизонтальной оси…». Меняем параметры горизонтальной оси. Аналогично делаем и с вертикальной осью.
- После этого программа произведет редактирование ранее построенного графика согласно тем изменениям, которые были произведены в настройках.

Рис. 4. График колебательного процесса.
Заключение
Таким образом, данный график может применяться на уроках физики, что позволит ученикам явно проследить изменение графика колебаний при изменении различных параметров. А ученикам, увлекающимся информатикой, эта работа поможет для моделирования гармонических колебаний, поможет еще больше узнать о возможностях табличного процессора MS Excel.
Список литературы
- Мякишев Г.Я. Учебник Физики 11 класса. Гармонические колебания. Просвещение, 2010. – 399с.
2. Фаза колебаний. https://www.calc.ru/Faza-Kolebaniy.html
3. Гарнаев А.Ю. Самоучитель VBA. СПб: БХВ, Санкт Петербург, 1999.
4. Веденеева Е.А. Функции и формулы Excel 2007. Библиотека пользователя. – Санкт Петербург, 2008. –384с.
5. Полосы прокрутки. https://excel2.ru/articles/polosa-prokrutki-element-upravleniya-formy-v-ms-excel
6. График. https://exceltable.com/grafiki/grafiki-i-diagrammi-v-excel
1. Моделирование гармонических колебаний в среде табличного процессора MS Excel
Работа ученицы 10 класса
МОУ СОШ пос. Мизур
Цогоевой Ирины
2. Периодические изменения физической величины в зависимости от времени, происходящие по закону синуса или косинуса, называются
ГАРМОНИЧЕСКИМИ
КОЛЕБАНИЯМИ
x
xm
0
xm
π/2
π
3π/2
T/4
T/2
3T/4
2π
T
φ
t
3. Уравнение гармонического колебания
x = xm cos(ω0 t + φ0)
x – смещение тела
t – время
xm – амплитуда колебаний
φ0- начальная фаза колебаний
ω – циклическая частота колебаний
4. Период колебаний
X
xm
t
T
Минимальный промежуток времени, через который
происходит повторение движения тела, называется
периодом колебаний T.
= t / n
5. Амплитуда колебания
X
xm
t
xm – амплитуда колебаний, т. е. максимальное
смещение от положения равновесия
6. Частота колебаний
X
1
Т
xm
T
Физическая величина, обратная периоду колебаний,
называется частотой колебаний. Частота колебаний
показывает, сколько колебаний совершается за 1 с.
Единица частоты – герц (Гц).
7. Циклическая частота колебаний
Циклическая или круговая частота — это число
колебаний тела за 2π с.
ω0 = 2π/T = 2π
8. Исследование влияния параметров гармонических колебаний на график колебательного процесса
9. Сложение колебаний
a1
a
a2
α
0
x1
a2
α1
x2
x
x1 = а1 cos (ω1t + α)
cos (ωt + α)
x2 = a2 cos (ω2t +α)
а² = а1² + а2² + 2 а1а2 cos (α2 – α1)
X
x=a
10. Сложение колебаний в MS Excel
11. Биения
12. Информатика, физика, математика – это не скучно!
Библиографическое описание:
Данилов, О. Е. Использование компьютерной модели математического маятника при изучении механических колебаний в курсе физики / О. Е. Данилов. — Текст : непосредственный // Молодой ученый. — 2014. — № 18 (77). — С. 17-24. — URL: https://moluch.ru/archive/77/13201/ (дата обращения: 16.04.2023).
В статье описана компьютерная программа, моделирующая движение кругового математического маятника. Кратко изложена методика применения этой программы для изучения механических колебаний в курсе физики.
Ключевые слова:компьютерное моделирование, модель, математический маятник, механические колебания, обучение с помощью компьютерных моделей, обучение физике.
Познавая окружающий мир, человек использует математические (упрощенные) модели реальных физических систем [12, с. 272–285]. Считается, что понимание физического явления возникает тогда, когда человек может построить для этого явления адекватную математическую модель. В физике редко встречаются точные и даже приближенные аналитические решения задач. Многие модели в физике и других науках описываются с помощью дифференциальных уравнений. У большинства из них нет аналитического решения, поэтому поведение исследуемого объекта, описываемого уравнением, может быть изучено только с помощью компьютера (численных методов решения дифференциальных уравнений) [7].
Вычислительный эксперимент представляет собой метод изучения физического явления или процесса путем построения их математической модели и следующего за ним численного исследования этой модели [11, с. 20]. Компьютерное моделирование бывает полезно не только в научных исследованиях [1; 2; 9; 13], но и при обучении [3; 4; 5, с. 4–5; 6]. В обоих случаях компьютерные моделирующие программы выполняют функции лаборатории для работы с моделью [7].
Колебания могут иметь различную физическую природу, но в то же время у них есть много общего. Изучение общих закономерностей колебаний является предметом теории колебаний. Изучение колебаний обычно начинается со знакомства обучающихся с колебательным движением, которое доступно зрительному восприятию. Как правило, это движение таких систем, как пружинный и математический маятники. Изучив колебания этих систем, можно затем освоить учебный материал, связанный с другими, не механическими колебаниями (например, электромагнитными).
Разработанная нами методика применения компьютерных моделей при изучении физики предполагает, что обучающиеся используют готовые (созданные преподавателем) компьютерные программы для того, чтобы они могли сосредоточиться не на моделировании, а на изучении физики явлений [8; 10]. Иными словами, в данном случае с помощью компьютерных моделей происходит изучение физических явлений и процессов, а не основ компьютерного моделирования. Обучающиеся, изменяя условия вычислительного эксперимента, наблюдают за моделью и открывают новые для себя знания об объекте исследования. Например, в рассматриваемой в этой статье программе в качестве исследуемого объекта выбран математический маятник, потому что он является достаточно простой для изучения колебательной системой, и его движение можно легко показать на экране компьютера.
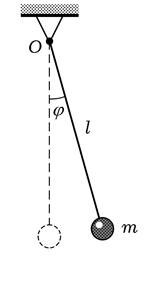
Рис. 1. Круговой математический маятник
Маятник — это тело, совершающее под действием приложенных сил (обычно силы тяжести) колебания около неподвижной точки или вокруг оси. Простейший маятник может состоять из груза и прикрепленного к нему тонкого стержня. Если считать стержень абсолютно твердым и пренебречь размерами груза по сравнению с длиной стержня, а массой стержня по сравнению с массой груза, то такую систему можно рассматривать как материальную точку массой m, находящуюся на неизменном расстоянии l от точки подвеса O (рис. 1). Этот идеализированный маятник и называется круговым математическим, так как траекторией движения материальной точки является дуга окружности, то есть стержень при движении маятника покрывает область пространства, соответствующую части круга — сектору. Маятник имеет одну степень свободы, так как его положение в пространстве можно однозначно задать с помощью единственной угловой координаты φ.
Моделирование с помощью вычислительной техники ни в коей мере не должно заменять натурный эксперимент, оно должно лишь дополнять его, позволяя в нашем случае продемонстрировать обучающимся такие детали колебательного движения, которые недоступны при непосредственном наблюдении. Например, можно изменять масштаб времени, визуально замедляя или ускоряя движение; создавать такие условия, которые трудно или невозможно воспроизвести в реальном эксперименте; строить в режиме реального времени графики, изображающие зависимости характеристик колебательного движения маятника от времени.
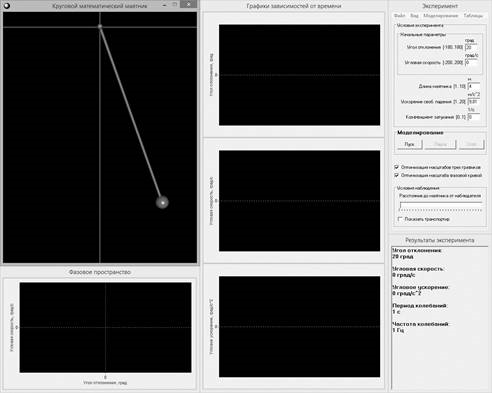
Рис. 2. Окна приложения, реализующего учебную компьютерную модель кругового математического маятника
Созданная нами компьютерная программа предоставляет возможность различной сложности изучения учебного материала. Это обеспечивает ее использование при работе с обучающимися с разной степенью подготовленности к восприятию результатов компьютерного моделирования.
Пять наиболее важных окон приложения, визуализирующего учебную компьютерную модель математического маятника, показаны на рис. 2. В первом окне обучающиеся могут наблюдать движение 3D-модели маятника в «режиме реального времени» (на самом деле, это время также является модельным, но близким к реальному). Программа предоставляет возможность изменять месторасположение наблюдателя (наблюдатель может рассматривать маятник с разных сторон и на разных расстояниях). Для большей наглядности можно расположить рядом с маятником транспортир. Во втором окне (оно расположено под первым) выводится фазовая кривая (зависимость угловой скорости маятника от угла его отклонения от положения равновесия). Третье окно, расположенное левее первых двух, предназначено для вывода трех графиков: зависимости угла отклонения маятника от времени, зависимости угловой скорости маятника от времени и зависимости углового ускорения маятника от времени. Четвертое окно содержит элементы управления моделью. Здесь пользователь программы может изменять параметры маятника и начальные условия эксперимента: угол отклонения маятника от положения равновесия и угловую скорость в начальный момент времени. В пятом окне выводятся текущие (в теории их называют мгновенными, то есть соответствующими данному моменту времени) значения угла отклонения, угловой скорости, углового ускорения, периода и частоты колебаний маятника.
Рассмотрим более подробно четвертое окно приложения. Оно содержит верхнее меню с пунктами «Файл», «Вид», «Моделирование», «Таблицы». Размещенные в нем элементы графического интерфейса позволяют, как уже было сказано выше, изменять начальные условия вычислительного эксперимента (начальный угол отклонения и начальную угловую скорость), а также длину маятника, ускорение свободного падения (напряженность гравитационного поля) и коэффициент сопротивления движению (или коэффициент затухания колебаний). Кроме того, окно содержит кнопки «Пуск», «Пауза» и «Стоп» для соответственно осуществления старта компьютерного модельного эксперимента с заданными начальными условиями, его временной остановки на определенном этапе моделирования с возможностью дальнейшего продолжения этого же эксперимента и полной остановки эксперимента, необходимой для задания новых условий следующего эксперимента.
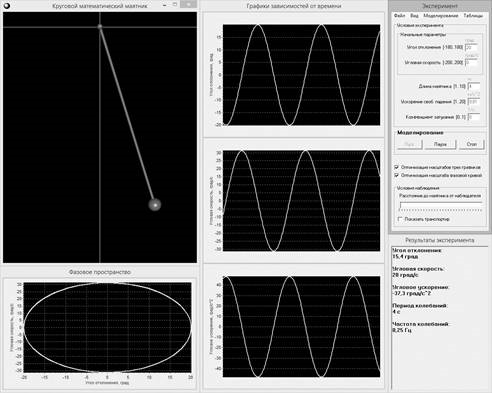
Рис. 3. Моделирование незатухающих (почти гармонических) колебаний маятника
Результаты моделирования программой движения маятника представлены на рис. 3, 4, 5 и 6. В качестве математической модели выбрано однородное дифференциальное уравнение второго порядка, описывающее колебательное движение маятника. Уравнение решается конечно-разностным методом. Это позволяет продемонстрировать обучающимся различные варианты движения и существенно отличает программу от аналогичных, которые предлагаются их создателями для демонстраций при обучении физике колебаний. Как правило, такие программы созданы учителями физики или методистами (либо программистами и методистами), которые почему-то используют в качестве математической модели частный случай решения упомянутого выше дифференциального уравнения, а именно: уравнение гармонических колебаний. В таких программах маятник легко и непринужденно совершает гармонические колебания при любых начальных углах отклонения от положения равновесия, что, конечно же, вводит обучающихся в заблуждение и формирует у них неправильные представления о колебаниях.
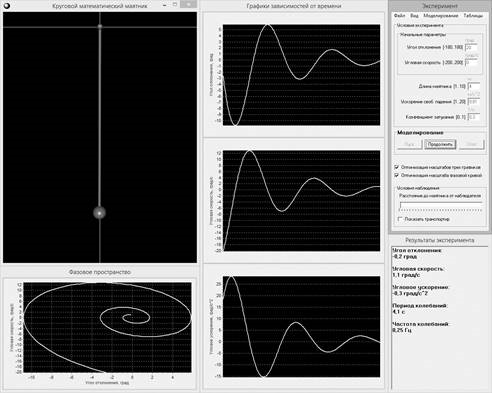
Рис. 4. Моделирование затухающих колебаний маятника
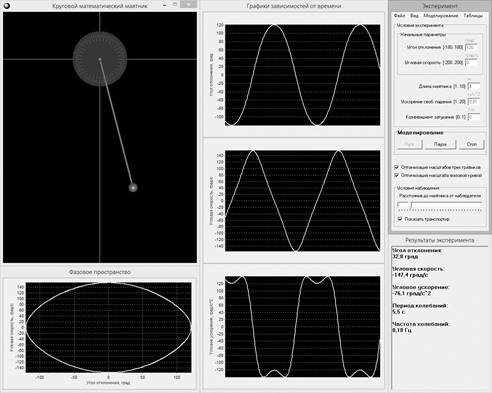
Рис. 5. Моделирование сильно отличающихся от гармонических колебаний маятника
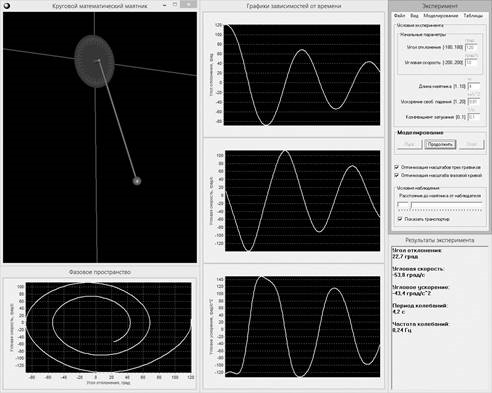
Рис. 6. Еще один пример колебаний маятника
На рис. 4, 5 и 6 приведены примеры движения маятника, демонстрирующие такие колебания маятника, которые существенно отличаются от гармонических. Тем не менее преподаватель при демонстрациях таких результатов должен объяснить обучающимся, что и такие движения носят модельный (идеальный) характер, а движения реальных колебательных систем описать абсолютно точно невозможно, так как слишком много факторов, влияющих на эти колебания, нужно учитывать (можно даже сказать, что количество этих факторов стремится к бесконечности). Любое описание реального движения является приблизительным.
Кроме того, что программа демонстрирует в динамике колебательное движение маятника, выводя синхронно этому движению на экран графики зависимости характеристик движения маятника от времени, она еще предоставляет обучающимся справочную информацию. Эту информацию можно вывести на экран компьютера с помощью элемента верхнего меню «Таблицы» четвертого окна. Предусмотрено два варианта вывода таких таблиц и соответствующих им графиков: первый — с помощью браузера (рис. 7), второй — с помощью редактора электронных таблиц MS Excel (рис. 8, 9 и 10). Первый вариант нужен в том случае, если на пользовательской машине не установлен пакет программ MS Office. Содержимое таблиц и внешний вид графиков могут быть изменены пользователем программы.
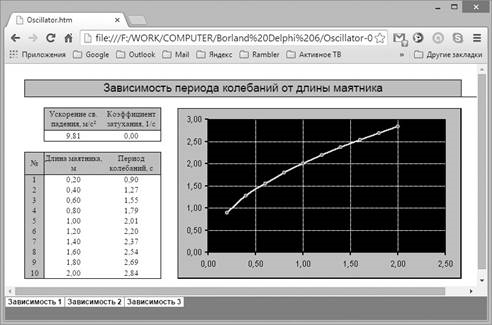
Рис. 7. Демонстрация зависимости периода колебаний маятника от его длины в браузере
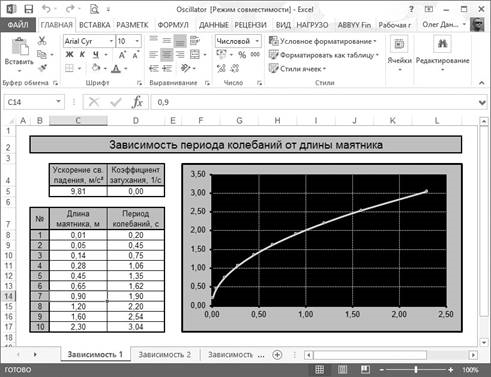
Рис. 8. Демонстрация зависимости периода колебаний маятника от его длины с помощью таблиц MS Excel
С помощью этих таблиц обучающиеся могут получить информацию о том, как зависит период колебаний маятника от различных параметров маятника и свойств окружающей его среды. Например, такими параметрами и свойствами могут быть длина маятника (рис. 7 и 8), ускорение свободного падения, иными словами — напряженность гравитационного поля планеты (рис. 9), трение в оси маятника или вязкость окружающей среды, которые приводят к затуханию колебаний (рис. 10).
Следует отметить, что рассмотренная в этой статье программа может быть использована как при демонстрациях преподавателем, так и при выполнении виртуальных лабораторных работ обучающимися, а также при проведении ими самостоятельных учебных исследований. Она является современным средством обучения физике и соответствует педагогическим и дидактическим требованиям, предъявляемым к программным средствам учебного назначения.
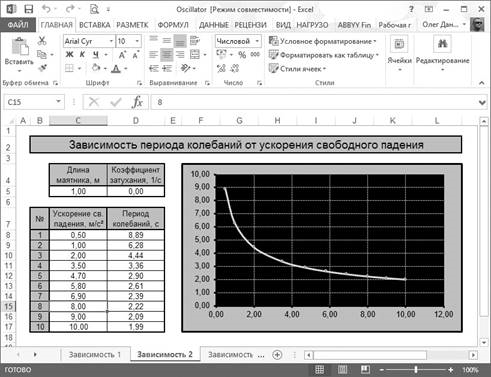
Рис. 9. Демонстрация зависимости периода колебаний маятника от ускорения свободного падения на планете (напряженности гравитационного поля) с помощью таблиц MS Excel
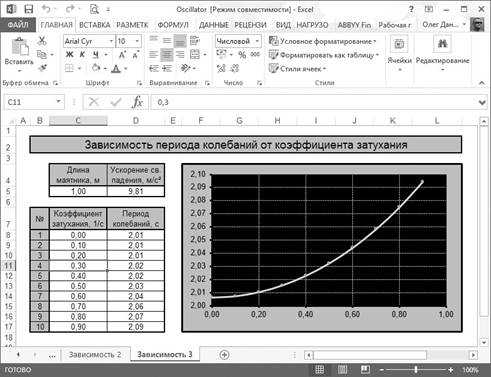
Рис. 10. Демонстрация зависимости периода колебаний маятника от коэффициента затухания колебаний с помощью таблиц MS Excel
Литература:
1. Герасимов В. А. Ветвление равновесных форм капель и пузырей в электрическом поле / В. А. Герасимов, О. Е. Данилов, В. А. Саранин // Гидродинамика: Сборник науч. трудов. Вып. 11. — Пермь: Перм. ун-т, 1998. — С. 114–123.
2. Данилов О. Е. Влияние газа на устойчивость равновесия кавитационного электрически заряженного пузыря / О. Е. Данилов, В. А. Саранин; Глазовский гос. пед. ин-т. — Глазов, 1994. — 13 с. — Деп. в ВИНИТИ 10.11.94; № 2534.
3. Данилов О. Е. Изучение интерференции с помощью компьютерного моделирования / О. Е. Данилов // Дистанционное и виртуальное обучение. — 2013. — № 9. — С. 50–58.
4. Данилов О. Е. Компьютерное моделирование движения молекул газа / О. Е. Данилов // Проблемы учебного физического эксперимента: Сборник научных и методических работ. Выпуск 2. — Глазов: ГГПИ, 1996. — С. 78–80.
5. Данилов О. Е. Компьютерное моделирование колебательного движения. Численные методы решения задач: учебно-методическое пособие / О. Е. Данилов, А. Ю. Трефилова. — Глазов: Глазов. гос. пед. ин-т, 2012. — 36 с.
6. Данилов О. Е. Компьютерное моделирование полей точечных зарядов / О. Е. Данилов, А. В. Ушаков // Проблемы учебного физического эксперимента: Сборник научных и методических работ. Выпуск 4. — Глазов: ГГПИ, 1998. — С. 65–69.
7. Данилов О. Е. Обучение компьютерному моделированию на примере создания компьютерной модели кругового математического маятника / О. Е. Данилов // Дистанционное и виртуальное обучение. — 2013. — № 10. — С. 80–87.
8. Данилов О. Е. Применение имитационного моделирования механических взаимодействий при обучении физике / О. Е. Данилов // Дистанционное и виртуальное обучение. — 2014. — № 5. — С. 97–103.
9. Данилов О. Е. Устойчивость равновесия электрически заряженных пузырей в условиях невесомости / О. Е. Данилов, В. А. Саранин // 11-я Международная школа по механике сплошных сред. Тезисы докладов. Кн. 1. — Екатеринбург: УрО РАН, 1997. — С. 111.
10. Данилов О. Е. Учебная компьютерная модель физического маятника / О. Е. Данилов // Молодой ученый. — 2014. — № 15. — С. 49–52.
11. Зарубин В. С. Моделирование: учеб. пособие для студ. учреждений высш. проф. образования / В. С. Зарубин. — М.: Издательский центр «Академия», 2013. — 336 с.
12. Кондратьев А. С. Современные технологии обучения физике: Учебное пособие / А. С. Кондратьев, Н. А. Прияткин. — СПб.: Изд-во С.-Петерб. ун-та, 2006. — 342 с.
13. Саранин В. А. К задаче об электрической зарядке двух шаров при их соприкосновении / В. А. Саранин, О. Е. Данилов // Физическое образование в вузах. — Т. 14. — 2008. — № 4. — С. 20–25.
Основные термины (генерируются автоматически): демонстрация зависимости периода колебаний маятника, математический маятник, вычислительный эксперимент, движение, колебание, колебание маятника, компьютерное моделирование, круговой математический маятник, математическая модель, модель, обучающийся, окно приложения, положение равновесия, помощь таблиц, программа, свободное падение.