
Возможности электронных таблиц Microsoft Excel очень многогранны. Excel является мощным вычислительным инструментом, позволяющим производить простые и сложные расчеты в различных областях человеческой деятельности: математике, физике, инженерных науках, экономике и технологии. Помимо осуществления расчетов возможно применение электронных таблиц Excel для наглядного изображения полученных результатов. Работа в Excel позволяет выполнять сложные расчеты, в которых могут использоваться данные, расположенные в разных областях электронной таблицы и связанные между собой определенной зависимостью. Для выполнения таких расчетов в Excel существует возможность вводить различные формулы в ячейки таблицы. Табличный процессор Excel выполняет вычисления и отображает результат в ячейке с формулой. Важной особенностью при работе с электронной таблицей является автоматический пересчет результатов при изменении значений ячеек. Применение электронных таблиц упрощает работу с данными и позволяет получать результаты без проведения расчетов вручную, что в свою очередь позволяет сохранить время, уменьшить вероятность просчёта в любых вычислительных операциях.
В данной работе рассматриваются возможности Excel для расчета и построения графика механической характеристики асинхронного двигателя.
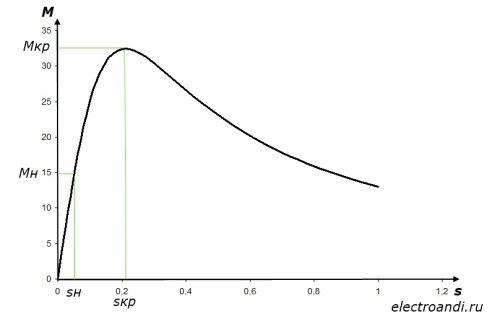
Под механической характеристикой принято понимать зависимость частоты вращения ротора в функции от электромагнитного момента n=f(M). Эту характеристику можно получить, используя зависимость M=f(S) и пересчитав частоту вращения ротора при разных значениях скольжения.
Номинальный режим работы двигателя:
где Mnom – номинальный момент двигателя (Нм);
Pn – номинальная мощность (кВт);
nn – номинальная частота вращения (мин-1).
Критический максимальный режим работы двигателя:
Mmax= λ × Mnom
Mnom – где номинальный момент двигателя (Нм);
Mmax – максимальный момент двигателя (Нм);
λ – перегрузочный коэффициент, характеризующий способность двигателя выдерживать максимальный вращательный момент.
Номинальное скольжение двигателя:

sn – где номинальное скольжение двигателя;
n0 – частота вращения холостого хода (мин-1);
nn – номинальная частота вращения (мин-1).
Критическое скольжение двигателя
sk – где критическое скольжение двигателя;
sn – номинальное скольжение двигателя;
Mnom – номинальный момент двигателя (Нм);
Mmax – максимальный момент двигателя (Нм).
Основные формулы для расчета механической характеристики:
n = n0 × (1 — s) − частота вращения двигателя (мин-1);
− момент двигателя (Нм) (формула Клосса).
Рассмотрим основные возможности Microsoft Excel, необходимые для проведения расчетов и построения графика механической характеристики асинхронного двигателя. Необходимость применения электронных таблиц для подобных расчетов обусловлена необходимостью выполнения множества однотипных расчетов. Microsoft Excel позволяет сделать это, используя функцию копирования формул.
Вычисления в таблицах процессора MS Excel осуществляется при помощи формул. Формула может содержать числовые константы, ссылки на ячейки и функции Excel, соединённые знаками математических операций. Скобки позволяют изменять стандартный порядок выполнения действий (операций).
Для графического представления числовых данных в Excel используются диаграммы. В Microsoft Excel имеется около 20 типов двухмерных и трехмерных диаграмм, каждая из которых имеет несколько разновидностей.
Основные точки механической характеристики асинхронного двигателя: пуск двигателя, номинальный рабочий режим, максимальный режим работы и холостой ход двигателя.
1. Пуск двигателя n = 0; М = Мпуск.
2. Максимальный режим М = Mmax.
3. Номинальный рабочий режим n = nн; М = Mн.
4. Холостой ход двигателя n = n0; М = 0.
В электронных таблицах следует создать таблицу с исходными данными.
|
Дано: |
Рн= |
0,13 |
кВт |
|
nн= |
870 |
об/мин |
|
|
Мmax/Мном |
2 |
||
|
n0= |
1000 |
об/мин |
Необходимо произвести вычисления по нахождению следующих показателей:
1) Номинальный режим работы двигателя;
2) Критический максимальный режим работы двигателя;
3) Номинальное скольжение двигателя;
4) Критическое скольжение двигателя.
Формулы для расчета:
|
1) Номинальный режим работы двигателя: |
||
|
Мном= |
=9550*$C$1/$C$2 |
Нм |
|
2) Критический максимальный режим работы двигателя |
||
|
Мmax= |
=$C$3*$B$7 |
Нм |
|
3) Номинальное скольжение двигателя |
||
|
Sn= |
=($C$4-$C$2)/$C$4 |
|
|
4) Критическое скольжение двигателя |
||
|
Sk= |
=$B$11*($C$3+КОРЕНЬ($C$3^2-1)) |
В результате должна получиться следующая таблица (рисунок 1):
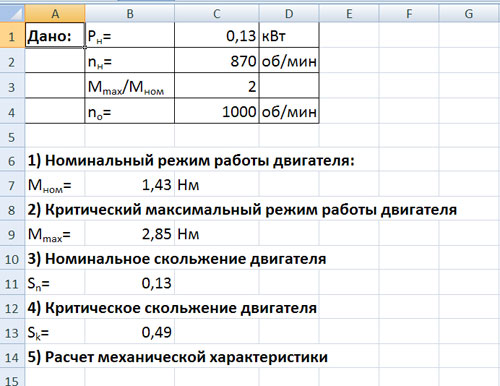
Рисунок 1
Для построения графика механической характеристики асинхронного двигателя необходимо создать таблицу:
|
s |
n, (мин-1) |
М, (Нм) |
|
0 |
0 |
значений нет |
Значения S изменяются от 0 до 1 с шагом 0,01, формулы для вычислений приведены ниже:
|
s |
n, (мин-1) |
М, (Нм) |
|
0 |
=$C$4*(1-A17) |
значений нет |
|
=A17+0,01 |
=$C$4*(1-A18) |
=2*$B$9/($B$13/A18+A18/$B$13) |
|
=A18+0,01 |
=$C$4*(1-A19) |
=2*$B$9/($B$13/A19+A19/$B$13) |
|
=A19+0,01 |
=$C$4*(1-A20) |
=2*$B$9/($B$13/A20+A20/$B$13) |
|
… |
… |
… |
|
=A31+0,01 |
=$C$4*(1-A32) |
=2*$B$9/($B$13/A32+A32/$B$13) |
|
=A32+0,01 |
=$C$4*(1-A33) |
=2*$B$9/($B$13/A33+A33/$B$13) |
В результате расчетов получаем таблицу с данными:
|
s |
n, (мин-1) |
М, (Нм) |
|
0 |
1000 |
значений нет |
|
0,01 |
990,00 |
0,12 |
|
0,02 |
980,00 |
0,23 |
|
0,03 |
970,00 |
0,35 |
|
… |
… |
… |
|
0,37 |
630,00 |
2,75 |
|
0,38 |
620,00 |
2,77 |
На основании полученных вычислений строим диаграмму. Для построения диаграммы необходимо выделить второй столбец, при построении использовать диаграмму «Точечная» для того, что бы изменить значения по оси ОХ необходимо вызвать контекстное меню, далее выбрать пункт «изменить» и в диалоговом окне изменить параметры оси ОХ, выбрав третий столбец.
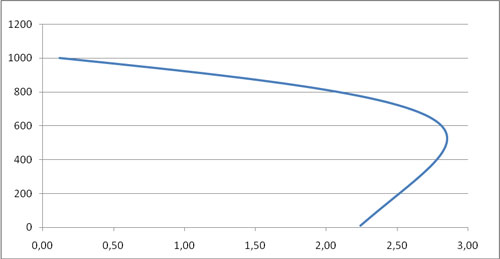
Рисунок 2 – Механическая характеристика асинхронного двигателя
На конкретном практическом примере учащихся знакомятся с определенным классом задач, которые успешно решаются с помощью электронных таблиц, и приобретают навыки практической работы в Excel. Это позволяет заложить фундамент для дальнейшего самостоятельного изучения возможностей Excel и успешно использовать пакет в учебной и профессиональной деятельности.
Список литературы:
- Кацман, М.М. Электрические машины и электропривод автоматических устройств: Учеб. для электротехн. спец. техникумов / М.М. Кацман. – М.: Высш. шк., 1987. – 335 с.
- Михеева, Е.В. Информационные технологии: Учеб.пособие для сред.проф.образования / Е.В. Михеева. – М.: Издательский центр «Академия», 2005.
- Угринович, Н.Д. Информатика и информационные технологии. Учебник для 10-11 классов / Н.Д. Угринович. – М.: БИНОМ. Лаборатория знаний, 2005.
Построение механической характеристики асинхронного двигателя
 Для оценки свойств асинхронного двигателя прибегают к построению механической характеристики.
Для оценки свойств асинхронного двигателя прибегают к построению механической характеристики.
Механическая характеристика асинхронного двигателя выражает зависимость между электромагнитным моментом и частотой вращения, либо скольжением. Скольжение – это величина, которая показывает, насколько частота вращения магнитного поля опережает частоту вращения ротора.
Благодаря механической характеристике, появляется возможность определить к какому типу установки больше подходит двигатель, на каком участке сохраняется его устойчивая работа, перегрузочную способность и другое.
Построим механическую характеристику для двигателя 4A90L4У3.
Паспортные данные двигателя:
n1 = 1500 об/мин
Pн = 2.2 КВт
nн = 1425 об/мин
η = 80 %
cos φ = 0.83
Mmax/Mн = λ = 2,2
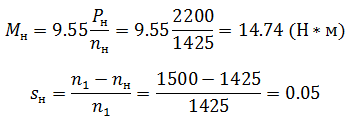
Для построения нам необходимо произвести расчет номинального момента и скольжения.
Рассчитаем критическое скольжение и момент, для этого необходимо знать коэффициент λ.
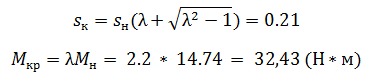
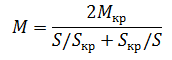
Итак, мы определили основные точки характеристики, но для её построения их недостаточно. Поэтому с помощью упрощенной формулы Клосса, рассчитаем моменты для других значений скольжений.
Упрощенная формула Клосса выглядит следующим образом
Для удобства составим таблицу.
|
s |
0 |
sн | sкр/2 | sкр |
0.2 |
0.3 |
0.4 |
0.5 |
0.6 |
0.7 |
0.8 |
0.9 |
1 |
|
M |
0 |
14.61 |
25.94 |
32.43 |
32,39 |
30.47 |
26.69 |
23.16 |
20.22 |
17.85 |
15.93 |
14.35 |
13.05 |
|
n |
1500 |
1425 |
1342.5 |
1185 |
1200 |
1050 |
900 |
750 |
600 |
450 |
300 |
150 |
0 |
Рассчитаем для каждого значения скольжения момент и частоту вращения. Например, для значения 0.2

Частоту вращения выразим из формулы для определения скольжения

Подобным образом рассчитываются остальные значения.
Так как формула упрощенная, значения могут несколько отличаться от действительных, что не критично для расчетов.
Теперь на основании расчетов мы можем построить саму механическую характеристику.
Зависимость момента от скольжения M = f(s)
Зависимость частоты оборотов от момента n = f(M)

Рекомендуем — механическая характеристика электропривода
Для того, чтобы
построить рабочие и механические
характеристики необходимо снять
показания
;
;
(пункт 3) при различных моментах нагрузки.
Данные (
(рад/c);
;
)
рассматриваемых точек, при различных
моментах нагрузки
(M(Hм))
заносятся в таблицу 4. По формулам
рассчитываются кпд

,
механическую мощность

и полезную электрическую мощность

(пункт 3).
По данным таблицы
4, в программе Excel
строятся диаграммы (точечные с гладкими
кривыми и маркерами) рабочих и диаграмма
(точечные с гладкими кривыми и маркерами)
механическая характеристик.
Механическая
характеристика МПТ,
это зависимость

Рабочие
характеристики МПТ,
это зависимость:





Графики оформляются,
как показана в примере МПТ с
последовательным возбуждением Приложение
Б или файл / пример
МПТ с последовательным возбуждением/
лист 1.
3. Содержание отсчета
3.1 Механическая
характеристика машины ω=f(M).
3.2 Рабочие
характеристики машины ω=f(P2),
I=f(P2),
M=f(P2),
P1=f(P2),
η= f(P2).
3.3 Выводы по работе
(анализ характеристик).
Защита лабораторной
работы производится после проверки
преподавателем отчёта по лабораторной
работе.
При отсутствии
ошибок в отчёте курсант допускается к
защите лабораторной работы по тестам.
Список тест-вопросов содержится в
приложении Б.
Приложение А
Таблица 1
Параметры МПТ
для выполнения лабораторной работы
|
№ варианта |
Ra, |
La, |
Rв, |
Lв, |
Laf, |
J, |
U, |
|
1 |
0,37 |
0,009 |
5,31 |
0,01 |
0,115 |
0,001 |
660 |
|
2 |
0,36 |
0,009 |
5,28 |
0,01 |
0,113 |
0,001 |
660 |
|
3 |
0,35 |
0,009 |
5,25 |
0,01 |
0,112 |
0,001 |
660 |
|
4 |
0,34 |
0,009 |
5,2 |
0,008 |
0,111 |
0,001 |
660 |
|
5 |
0,33 |
0,009 |
5,1 |
0,008 |
0,1 |
0,001 |
660 |
|
6 |
0,32 |
0,008 |
5 |
0,008 |
0,098 |
0,001 |
660 |
|
7 |
0,31 |
0,008 |
4,9 |
0,007 |
0,096 |
0,001 |
660 |
|
8 |
0,3 |
0,008 |
4,8 |
0,007 |
0,094 |
0,001 |
660 |
|
9 |
0,29 |
0,008 |
4,7 |
0,007 |
0,092 |
0,001 |
660 |
|
10 |
0,28 |
0,008 |
4,6 |
0,007 |
0,09 |
0,001 |
660 |
|
11 |
0,27 |
0,007 |
4,5 |
0,0065 |
0,088 |
0,001 |
660 |
|
12 |
0,26 |
0,007 |
4,4 |
0,0065 |
0,086 |
0,001 |
660 |
|
13 |
0,25 |
0,007 |
4,3 |
0,0065 |
0,084 |
0,001 |
660 |
|
14 |
0,24 |
0,007 |
4,2 |
0,0065 |
0,082 |
0,001 |
660 |
|
15 |
0,23 |
0,007 |
4,1 |
0,0065 |
0,08 |
0,001 |
660 |
|
16 |
0,22 |
0,006 |
4 |
0,006 |
0,079 |
0,001 |
660 |
|
17 |
0,21 |
0,006 |
3,95 |
0,006 |
0,078 |
0,001 |
660 |
|
18 |
0,2 |
0,006 |
3,9 |
0,006 |
0,077 |
0,001 |
660 |
|
19 |
0,19 |
0,006 |
3,8 |
0,006 |
0,076 |
0,001 |
660 |
|
20 |
0,18 |
0,006 |
3,75 |
0,006 |
0,075 |
0,001 |
660 |
|
21 |
0,17 |
0,005 |
3,7 |
0,0055 |
0,074 |
0,001 |
660 |
|
22 |
0,16 |
0,005 |
3,65 |
0,0055 |
0,073 |
0,001 |
660 |
|
23 |
0,16 |
0,005 |
3,6 |
0,0055 |
0,072 |
0,001 |
660 |
|
24 |
0,14 |
0,005 |
3,55 |
0,005 |
0,071 |
0,001 |
660 |
|
25 |
0,13 |
0,005 |
3,5 |
0,005 |
0,07 |
0,001 |
660 |
Приложение Б
Таблица 4
Снятие показания
приборов
-
Задание
Измерения
Расчет
М,
Нмω,
рад/сIя,
АIв,
АP1,
ВтP2,
Втη
5
778,3
6,933
6,933
4575,78
3891,5
0,85046
4
833,3
6,502
6,502
4291,32
3333,2
0,77673
6
727,8
7,385
7,385
4874,1
4366,8
0,89592
8
640,3
8,315
8,315
5487,9
5122,4
0,9334
10
570,2
9,257
9,257
6109,62
5702
0,93328
15
454
11,4
11,4
7524
6810
0,9051
20
385,9
13,18
13,18
8698,8
7718
0,88725
25
339,9
14,74
14,74
9728,4
8497,5
0,87347
30
305,9
16,15
16,15
10659
9177
0,86096
35
279,6
17,45
17,45
11517
9786
0,8497
40
258,4
18,63
18,63
12295,8
10336
0,84061
45
240,7
19,77
19,77
13048,2
10831,5
0,83011
50
225,8
20,85
20,85
13761
11290
0,82043

6
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
1. Мощность,
потребляемая двигателем из сети при номинальной нагрузке:
![]()
Формула EXCEL: =$C$5/$D$5
Линейный ток
статора при номинальной нагрузке:
Формула EXCEL: =B33/(КОРЕНЬ(3)*$H$5*$E$8)
Фазный ток
статора при номинальной нагрузке:
Формула
EXCEL: =C33/(КОРЕНЬ(3)^(1-$A$8))
Фазное напряжение статора при
номинальной нагрузке, где B0 — переменная, принимающая значение,
равное нулю для схемы соединения обмоток статора «треугольник», будет равно:
Формула EXCEL: =H5/(КОРЕНЬ(3)^($A$8))
2.Синхронная
частота вращения, где p — число пар полюсов, будет равна:
Формула
EXCEL: =60*$B$5/$A$5
Номинальное
скольжение и частота тока в роторе при номинальной частоте вращения:
![]()
Формула
EXCEL для Sн: =(F33-$D$8)/F33
Формула
EXCEL для f2H: =G33*$B$5
3.Общие потери
в двигателе в номинальном режиме:
![]()
Формула
EXCEL: =B33-$C$5
Потери на трение:
Формула EXCEL для
Pтр: =B37*(F33/1000)^2*($C$8/1000)^3
Формула EXCEL для k: =3+0,5*(($C$8-100)/400)
Добавочные потери в двигателе:
![]()
Формула EXCEL: =0,005*B33
Активное сопротивление обмотки статора при 75 градусах Цельсия, где kT=1.24
— коэффициент, учитывающий изменение активного сопротивления обмотки статора
при нагревании от 15 до 75 градусов Цельсия:
![]()
Формула
EXCEL: =$F$8*$B$8
Потери в
обмотках статора:
![]()
Формула EXCEL: =3*D33^2*D37
Полная
механическая мощность:
![]()
Формула
EXCEL: =$C$5+J33+C37
Потери в
обмотках ротора:
Формула EXCEL: =G33/(1-G33)*F37
Потери в стали:
![]()
Формула EXCEL: =I33-E37-G37-J33-C37
4.Фазный и
линейный токи в режиме холостого хода статора:
![]()
![]()
Формула EXCEL для I1Ф0 : =D33*$E$5
Формула EXCEL для I10 : =$E$5*C33
Потери в
обмотках статора в режиме холостого хода:
![]()
Формула
EXCEL: =3*I37^2*$B$8
Мощность, потребляемая двигателем в режиме холостого хода:
![]()
Формула
EXCEL: =B41+J33+C37+H37
Коэффициент
мощности и угол j0 в режиме
холостого хода:
![]()
Формула
EXCEL для cosj0: =C41/(КОРЕНЬ(3)*H5*J37)
Формула
EXCEL для j0: =ACOS(D41)
5.Номинальный
момент двигателя:
Формула EXCEL: =9,549*($C$5/$D$9)
Максимальный
момент двигателя:
![]()
Формула
EXCEL: =$F$5*F41
6.Критическое
скольжение:

Формула
EXCEL: =G33*($F$5+КОРЕНЬ($F$5^2-1))
7.Индуктивное
сопротивление короткого замыкания, где U1ФН — номинальное фазное
напряжение двигателя:
Формула
EXCEL: =КОРЕНЬ((3*$A$5*E33^2/(4*3,14*$B$5*G41)-D37)^2-D37^2)
Приведённое
активное сопротивление обмотки ротора:

Формула
EXCEL для R’2: =G33*(B45+КОРЕНЬ(B45^2-(D37^2+I41^2)))
Формула
EXCEL для k1:
=3*$A$5*E33^2/(4*3,14*$B$5*F41)-D37
Модуль полного
сопротивления контура намагничивания:
![]()
Формула
EXCEL: =E33/I37
Активное и
индуктивное сопротивления контура намагничивания:
![]()
![]()
Формула
EXCEL для R0: =C41/(3*I37^2)
Формула
EXCEL для X0: =КОРЕНЬ(C45^2-D45^2)
Активная и
реактивная составляющие фазного тока намагничивания:
![]()
![]()
Формула
EXCEL для I1Ф0А: =I37*COS(E41)
Формула EXCEL для I1Ф0Р: =-I37*SIN(-E41)
8.Активное
сопротивление рабочей ветви:
![]()
Формула
EXCEL: =$D$37+$J$41/B50
Примечание:
С данной
формулы, согласно заданию, начинает изменяться скольжение по следующему закону S=(0,25;0,5;0,75;1,0;1,25)SН.
В результате чего в EXCEL получаем по десять значений ответов для каждого
параметра. В данной части курсовой работы представим в таблицах параметры
двигателя, рассчитанные при значениях S=(0,25;0,5;0,75;1,0;1,25)SН
для значения f=50 Гц. Все результаты вычислений
при частоте 60 Гц приводим в таблице 5 приложения(стр.36-37)
Модуль полного
сопротивления и фазовый угол рабочей ветви:
![]()
Формула
EXCEL для Z11:
=КОРЕНЬ(C50^2+$I$41^2)
Формула
EXCEL для φ11: =-ATAN($I$41/C50)
ПРАКТИЧЕСКАЯ РАБОТА №8
«Расчет рабочих характеристик асинхронного двигателя»
ЦЕЛЬ РАБОТЫ: построить упрощенную круговую
диаграмму трехфазного асинхронного двигателя и определить параметры, соответствующие
его номинальному режиму работы.
КРАТКИЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ:
Рабочие характеристики асинхронного двигателя
(рис. 8.1) представляют собой графически выраженные зависимости частоты вращения
n2,
КПД η, полезного момента (момента на валу) М2, коэффициента мощности
cos φ, и тока статора I1 от полезной мощности Р2 при
U1
= const f1 = const.
Скоростная характеристика n2 = f(P2). Частота
вращения ротора асинхронного двигателя n2 = n1(1 — s).
s = Pэ2/ Pэм,
(8.1), т. е. скольжение двигателя, а следовательно, и его частота вращения
определяются отношением электрических потерь в роторе к электромагнитной
мощности Рэм. Пренебрегая
электрическими потерями в роторе в режиме холостого хода, можно принять Рэ2
= 0, а поэтому s ≈ 0 и n20 ≈ n1.
Рис. 8.1. Рабочие характеристики асинхронного
двигателя

По мере увеличения нагрузки на валу двигателя отношение (8.1)
растет, достигая значений 0,01—0,08 при номинальной нагрузке. В соответствии с
этим зависимость n2 = f(P2) представляет
собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного
сопротивления ротора r2‘
угол наклона этой кривой увеличивается. В этом случае изменения частоты
вращения n2 при колебаниях нагрузки Р2 возрастают.
Объясняется это тем, что с увеличением r2‘ возрастают электрические потери в роторе.
Зависимость М2 =f(P2). Зависимость полезного момента на валу
двигателя М2 от полезной мощности Р2 определяется
выражением
M2 = Р2/ ω2
= 60 P2/ (2πn2)
= 9,55Р2/ n2, (8.2)
где Р2 — полезная мощность, Вт; ω2 =
2πf 2/ 60 — угловая
частота вращения ротора.
 Из этого выражения следует, что если n2 = const, то график М2 =f2(Р2) представляет собой прямую линию. Но в асинхронном
Из этого выражения следует, что если n2 = const, то график М2 =f2(Р2) представляет собой прямую линию. Но в асинхронном
двигателе с увеличением нагрузки Р2 частота вращения ротора
уменьшается, а поэтому полезный момент на валу М2 с увеличением
нагрузки возрастает не сколько быстрее нагрузки, а следовательно, график М2
=f (P2) имеет криволинейный вид.
Рис. 8.2. Векторная диаграмма асинхронного двигателя
при небольшой нагрузке
Зависимость cos φ1 =
f (P2). В связи с тем что ток статора I1 имеет реактивную
(индуктивную) составляющую, необходимую для создания магнитного поля в
статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее
значение коэффициента мощности соответствует режиму х.х. Объясняется это тем,
что ток х.х. I0 при любой нагрузке остается практически неизменным.
Поэтому при малых нагрузках двигателя ток статора невелик и в значительной
части является реактивным (I1 ≈ I0). В результате сдвиг
по фазе тока статора ![]() , относительно напряжения
, относительно напряжения ![]() , получается значительным (φ1 ≈
, получается значительным (φ1 ≈
φ0), лишь немногим меньше 90° (рис. 8.2). Коэффициент мощности
асинхронных двигателей в режиме х.х. обычно не превышает 0,2.
Рис. 8.3. Зависимость cos φ1,от
нагрузки при  соединении обмотки
соединении обмотки
статора звездой (1) и треугольником (2)
При увеличении нагрузки на валу двигателя растет активная
составляющая тока I1 и коэффициент
мощности возрастает, достигая наибольшего значения (0,80—0,90) при нагрузке,
близкой к номинальной. Дальнейшее увелиичение нагрузки сопровождается
уменьшением cos φ1 что объясняется
возрастанием индуктивного сопротивления ротора (x2s) за счет увеличения скольжения, а следовательно, и частоты тока в
роторе. В целях повышения коэффициента мощности асинхронных двигателей
чрезвычайно важно, чтобы двигатель работал всегда или по крайней мере
значительную часть времени с нагрузкой, близкой к номинальной. Это можно
обеспечить лишь при правильном выборе мощности двигателя. Если же двигатель
работает значительную часть времени недогруженным, то для повышения cos
φ1, целесообразно подводимое к двигателю
напряжение U1 уменьшить.
Например, в двигателях, работающих при соединении обмотки статора
треугольником, это можно сделать пересоединив обмотки статора в звезду, что
вызовет уменьшение фазного напряжения в ![]() раз.
раз.
При этом магнитный поток статора,
а следовательно, и намагничивающий ток уменьшаются примерно в ![]() раз. Кроме того, активная составляющая
раз. Кроме того, активная составляющая
тока статора несколько увеличивается. Все это способствует повышению коэффициента
мощности двигателя. На рис. 8.3 представлены графики зависимости cos φ1, асинхронного двигателя от нагрузки при соединении
обмоток статора звездой (кривая 1) и треугольником (кривая 2).
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ:
1.
Решить задачу №1. По рабочим характеристикам трехфазных асинхронных
двигателей, приведенным в Приложении, и данным табл. 8.1 по каждому из
предлагаемых вариантов требуется определить:
а) параметры
двигателя в номинальном режиме работы — ток статора I1ном,
КПД ηном, коэффициент мощности cos
φном, скольжение
sном,
частоту вращения nном,
потребляемую мощность Р1ном;
б) максимальное
значение КПД ηmах
и соответствующие этому КПД нагрузку Р2, выразив ее в долях от
номинальной Рном;
в) отношение
переменных потерь Рпер.ном к постоянным потерям Рпост
при номинальной нагрузке;
г) активное
сопротивление фазы обмотки статора rх.
Таблица 8.1.
|
Параметр |
Варианты |
|||||
|
1 |
2 |
3 |
4 |
5 |
6 |
|
|
Рисунок |
П. |
П. |
П. |
П. |
П. |
П. |
|
Рном , кВт |
250 |
2,8 |
7,5 |
160 |
4,0 |
45 |
|
Напряжение |
660 |
220 |
380 |
380 |
220 |
380 |
|
Схема |
Y |
Δ |
Y |
Δ |
Δ |
Y |
|
2 р |
4 |
4 |
4 |
4 |
4 |
4 |
Решение:
—
определить параметры двигателя при
номинальном режиме (см. рис. П. 2.1 ): полезную мощность двигателя Рном
, ток статора I1ном
,скольжение sном
, частоту вращения пном
, коэффициент полезного действия ηном , коэффициент мощности cos φ1ном
, потребляемая мощность Р1ном= Рном / η;
—
определить максимальное значение КПД ηmах
соответствует нагрузке Р2
= 150 0,6Рном (см. рис. П.2.1).
—
определить потребляемую двигателем
мощность при нагрузке 0,6Рном : Р1/ηmах;
—
определить сумму потерь при нагрузке 0,6Рном
: ![]() ;
;
—
определить величину постоянных потерь: ![]() ;
;
—
определить суммарные потери двигателя при
номинальной нагрузке: ![]() ;
;
—
определить переменные потери в режиме
номинальной нагрузки: ![]() ;
;
—
определить отношение переменных потерь к
постоянным при номинальной нагрузке: ![]() ;
;
—
определить добавочные потери при
номинальной нагрузке: ![]() ;
;
—
определить момент холостого хода: ![]() ;
;
—
определить номинальный момент на валу
двигателя: ![]() ;
;
—
определить электромагнитный момент в
номинальном режиме: ![]() ;
;
—
определить электромагнитную мощность в
номинальном режиме: ![]() ;
;
—
определить величину электрических потерь в
обмотке ротора в режиме номинальной нагрузки: ![]() ;
;
—
определить величину электрических потерь в
обмотке статора в режиме номинальной нагрузки: ![]() ;
;
—
определить активное сопротивление фазы обмотки статора:
![]() .
.
2.
Решить
задачу №2. Построить упрощенную круговую диаграмму
трехфазного асинхронного двигателя и определить параметры, соответствующие
его номинальному режиму работы. Необходимые для построения диаграммы данные
приведены в табл. 8.2: номинальная мощность Рном; напряжение на
обмотке статора (фазное) U1ф;
номинальный ток статора (фазный) I1ф;
число полюсов 2р;
активное сопротивление фазной обмотки статора при рабочей температуре rx;
ток холостого хода (фазный) I0ф;
мощность холостого хода Р0; мощность идеального холостого хода ![]() механические
механические
потери Рмех; коэффициент мощности холостого хода сos
φ0;
мощность короткого замыкания Рк; напряжение
короткого замыкания (фазное) UK;
коэффициент мощности короткого замыкания cos
φк; частота
тока 50 Гц.
Таблица 8.2.
|
Параметр |
Варианты |
|||||
|
1 |
2 |
3 |
4 |
5 |
6 |
|
|
Рном, |
3,0 |
12 |
70 |
22 |
250 |
16 |
|
U1ф, В |
220 |
220 |
220 |
220 |
1730 |
220 |
|
I1ф, |
6,3 |
25 |
190 |
54 |
60 |
40 |
|
2 р |
4 |
4 |
4 |
8 |
6 |
8 |
|
r1ф, |
1,7 |
0,32 |
0,035 |
0,15 |
0,68 |
0,15 |
|
I0ф , А |
1,83 |
9,7 |
55 |
32,8 |
17,5 |
9,6 |
|
Р0, Вт |
300 |
565 |
6500 |
1340 |
10 750 |
950 |
|
Р’0, Вт |
283 |
475 |
6180 |
1120 |
10125 |
890 |
|
Рмех,ВТ |
200 |
250 |
600 |
370 |
1350 |
270 |
|
сos |
0,24 |
0,10 |
0,20 |
0,064 |
0,12 |
0,15 |
|
Рк,Вт |
418 |
1780 |
9500 |
2360 |
12 |
1740 |
|
Uк.ф,В |
59,5 |
57,8 |
58,0 |
44,0 |
360 |
42,0 |
|
cos |
0,37 |
0,34 |
0,30 |
0,33 |
0,25 |
0,34 |
Решение:
—
определить углы фазового сдвига токов
холостого хода ![]() и короткого замыкания
и короткого замыкания
![]() относительно
относительно
напряжения ![]() (рис. 8.1): φ0=arccos(сos
(рис. 8.1): φ0=arccos(сos
φ0), φк=arccos(сos
φк);
—
определить ток короткого замыкания
(фазный), приведенный к номинальному напряжению: ![]() ;
;
—
принять масштаб тока исходя из размеров
листа бумаги, на котором предполагается построение диаграммы; например, если
применяется лист форматом А4 (210 х 297 мм), то масштаб тока m1
=0,1 А/мм;
—
определить длину векторов тока: холостого
хода — ![]() ;
;
номинального тока статора — ![]() ; тока короткого
; тока короткого
замыкания — ![]() ;
;
—
определить масштабы мощности и момента: ![]() ;
;![]() ;
;
—
на оси ординат из точки О построить вектор
напряжения U1ф
произвольной длины и под углом φ0
к оси ординат строим вектор тока холостого хода ОН
и под углом φк
строим вектор тока короткого замыкания ОК;
—
из точки Н
параллельно оси
абсцисс провести прямую, на которой отложить отрезок НС,
равный диаметру окружности токов ![]() , где
, где ![]() ;
;
—
из точки O1,
лежащей посередине диаметра окружности, радиусом НС/2
провести полуокружность токов. При этом точки Н и К
оказываются на этой полуокружности. Соединить точки Н
и К и получить
линию полезной мощности НК;
—
на окружности токов отметить точку D1
(точка номинального режима нагрузки двигателя). Для этого из точки О отложить
отрезок OD1
;
—
на средней части отрезка О1С
отметить точку
F,
в которой восстановить перпендикуляр к диаметру НС.
На этом перпендикуляре отметить отрезок ![]() ;
;
—
из точки Н
через точку Fl провести
прямую до пересечения с окружностью токов в точке Т,
соответствующей скольжению s —
±¥. Полученная линия НТ
является линией электромагнитной мощности
(момента);
—
из точки O1,
опустить перпендикуляр на линию НТ
и продолжить его до пересечения с окружностью токов в точке Е.
Полученная таким образом точка Е
соответствует максимальному моменту, так как отрезок EN в
масштабе моментов представляет собой максимальный момент двигателя, а отношение
отрезков ![]() —
—
перегрузочную способность двигателя;
—
точка D1
на окружности токов соответствует режиму номинальной
нагрузки двигателя. Прямоугольный треугольник OD1a представляет
собой треугольник токов:
сторона OD1
— номинальный ток статора (см. п. 4), сторона D1a —
активная составляющая тока статора, сторона Оа
— реактивная (индуктивная) составляющая тока статора.
—
для определения коэффициента мощности двигателя сos
φ1
сделать дополнительные построения: на оси ординат радиусом
50 мм провести полуокружность, а линию OD1
продолжить до пересечения с этой полуокружностью в
точке h.
Отношение отрезка Oh к
диаметру полуокружности определяет значение коэффициента мощности в режиме
номинальной нагрузки: ![]()
![]() ;
;
—
для определения скольжения и частоты
вращения ротора двигателя также необходимы дополнительные построения: из точки Н
параллельно оси ординат провести линию HQ,
затем из
точки Q параллельно
линии электромагнитной мощности НТ
провести линию
до пересечения с продолжением линии полезной мощности НК
в точке L.
Полученная таким образом линия QL представляет
собой шкалу скольжения:
в точке холостого хода Н
скольжение s =
0, а в точке короткого замыкания К
скольжение s =
1. Продолжив отрезок HD1
до пересечения со шкалой скольжения, получится на
шкале скольжения точка s1
которая определит скольжение двигателя в режиме
номинальной нагрузки, частота вращения при этом равна ![]() ;
;
—
проверить значение номинальной мощности
двигателя по формуле: ![]() ;
;
—
определить потребляемую в номинальном
режиме мощность:![]() ;
;
—
определить КПД двигателя в номинальном
режиме: ![]() ;
;
—
определить электромагнитный момент в
номинальном режиме: ![]() .
.
3.
Решить
задачу №3. Используя значения параметров трехфазных
асинхронных двигателей, приведенные в таблице 8.3 (см. табл. 8.4), рассчитать
параметры и построить рабочие характеристики асинхронного двигателя: I1
М2, n2,
сos
φ1,
η= f(Р2).
При этом можно воспользоваться либо упрощенной круговой диаграммой,
построенной при решении задачи №2, либо применить аналитический метод расчета
рабочих характеристик.
Решение
аналитическим методом:
—
определить активную и реактивную
составляющие тока холостого хода: ![]() ;
;
—
определить сопротивление короткого
замыкания: ![]() ;
;
—
определить активную и реактивную
составляющие сопротивления короткого замыкания: ![]() ;
;
—
определить приведенное значение активного
сопротивления обмотки ротора: ![]() ;
;
—
определить критическое скольжение: ![]() ;
;
—
определить номинальное скольжение sном:
—
определить величину магнитных потерь: ![]() ;
;
—
рассчитать значения параметров,
приведенных в таблице 8.5. для ряда значений скольжения s =
0,01; 0,02; 0,03; 0,045; 0,06 и для каждого из них выполняем расчет;
—
результаты представляем в виде таблицы
8.4;
—
по полученным данным построить рабочие
характеристики двигателя (рис. 8. 5).
Таблица 8.3.

Таблица 8.4.
|
Расчетные |
Значения |
||||
|
0,01 |
0,02 |
0,03 |
0,045 |
0,06 |
|

Рисунок 8.5. Рабочие характеристики
АД
Таблица
8.5.

4.
Оформить отчет по практической работе.
5.
Ответить на контрольные вопросы.
6.
Сделать вывод о проделанной работе.
КОНТРОЛЬНЫЕ ВОПРОСЫ:
1.
Что представляют собой рабочие
характеристики асинхронного двигателя?
2.
Что такое скоростная характеристика
асинхронного двигателя?
3.
Как повысить коэффициент мощности
асинхронных двигателей?

|
Рисунок 8.5.
|
ПРИЛОЖЕНИЕ








